Alright if you will allow me one final outlandish idea...
I misspoke earlier. You CAN simulate angled terrain on this thing as long as you put the entire room on a single 2DOF motorized platform. So if you wanted to simulate walking a straight uphill mile, you would still have the path given on the first image but the platform would always keep you facing uphill. The whole room would move like a wobbly see-saw as you walked back and forth between the circles.
I'm know I'm being ridiculous, but it's only because I'm talking about the ultimate solution in VR rooms. I mean if you loaded in the Google Earth terrain maps, you could honestly walk from Florida to California! How's that for open ended!
Envisioning a DIY CyberCarpet for Omnidirectional Motion
-
brantlew

- Petrif-Eyed
- Posts: 2221
- Joined: Sat Sep 17, 2011 9:23 pm
- Location: Menlo Park, CA
-
WiredEarp
- Golden Eyed Wiseman! (or woman!)
- Posts: 1498
- Joined: Fri Jul 08, 2011 11:47 pm
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
Here is a question for those with Novint Falcons. What is the potential up down travel of those?
Basically, what we require for my envisioning is a pair of falcon type devices with enough up / down travel to enable lifting up my foot to a reasonable height. All else will be done in software (turning, jumping, walking, etc) with the falcons providing force feedback of the surface. IE, we are replacing the hand attachment of a Falcon with a foot attachment.
With enough travel on devices like this, you could kick and jump with a reasonable simulation of reality. You could even have your virtual kicks be checked.
If most of the users weight is taken up by other devices (harness/saddle) then you could achieve it without requiring big systems that need to support your entire body load - they will just have to move your leg weight.
Basically, what we require for my envisioning is a pair of falcon type devices with enough up / down travel to enable lifting up my foot to a reasonable height. All else will be done in software (turning, jumping, walking, etc) with the falcons providing force feedback of the surface. IE, we are replacing the hand attachment of a Falcon with a foot attachment.
With enough travel on devices like this, you could kick and jump with a reasonable simulation of reality. You could even have your virtual kicks be checked.
If most of the users weight is taken up by other devices (harness/saddle) then you could achieve it without requiring big systems that need to support your entire body load - they will just have to move your leg weight.
-
Synexious
- Sharp Eyed Eagle!
- Posts: 381
- Joined: Mon Aug 09, 2010 6:08 pm
- Location: Houston
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
Excellent idea, Earp! Sounds like you're envisioning an omnidirectional elliptical device. I wonder how that could be built, or if someone already has made such a product. A heavy-duty device could be built that takes on the whole weight of the body. That might be the best compact and relatively affordable way to achieve ODMiP (Omnidirectional Motion in Place).
-
brantlew
- Petrif-Eyed
- Posts: 2221
- Joined: Sat Sep 17, 2011 9:23 pm
- Location: Menlo Park, CA
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
@Earp: It's a solid idea. The best thing about it is how compact and versatile it would be. The mechanical build would be daunting - to say the least. Not sure it would fall into the DIY category, but it does seem like something that if done well could be very realistic. The more load bearing the device, the more realistic it would feel. An additional advantage is that you could simulate all types of terrain - stairs, inclines, rocky, even slippery terrain could be modeled. Novint would definitely have a head start on this type of device and could leverage a lot of their existing R&D.
-
Synexious
- Sharp Eyed Eagle!
- Posts: 381
- Joined: Mon Aug 09, 2010 6:08 pm
- Location: Houston
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
Wow, you're right, any terrain could be simulated, which isn't possible even with the most expensive ODTs. But you couldn't cross your legs over each other, and you wouldn't have free range of motion to dance and kick.
-
cybereality

- 3D Angel Eyes (Moderator)
- Posts: 11407
- Joined: Sat Apr 12, 2008 8:18 pm
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
The Falcon can move within a 1 foot cube (maybe a little less). It would certainly not be enough for a foot attachment, and I don't believe its that strong anyway. However a similarly designed haptic device could work, provided it was much larger and strong enough to handle foot movement.
-
PalmerTech
- Golden Eyed Wiseman! (or woman!)
- Posts: 1644
- Joined: Fri Aug 21, 2009 9:06 pm
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
Can't find the link right now, but there was a military project like that at one point. It used two industrial robotic arms with a strap for each foot, and could simulate almost any terrain (Including stairs).
As I recall, one of the main problems was the immense fear of everyone who used the system. A single malfunction or slip, and the robotic arms might break or sever your foot/leg! It was a long time ago, and I know that modern robotics systems have a lot of failsafes, but I would be pretty scared of anything DIY that can exert so much force.
It was a long time ago, and I know that modern robotics systems have a lot of failsafes, but I would be pretty scared of anything DIY that can exert so much force.
As I recall, one of the main problems was the immense fear of everyone who used the system. A single malfunction or slip, and the robotic arms might break or sever your foot/leg!
-
Synexious
- Sharp Eyed Eagle!
- Posts: 381
- Joined: Mon Aug 09, 2010 6:08 pm
- Location: Houston
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
Couldn't the force just be limited?
-
Fredz
- Petrif-Eyed
- Posts: 2255
- Joined: Sat Jan 09, 2010 2:06 pm
- Location: Perpignan, France
- Contact:
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
Your discussions are very interesting, you got me looking for more on YouTube.
Found this, perhaps related to what PalmerTech was talking about :
[youtube]http://www.youtube.com/watch?v=4BkY8LGjW4w[/youtube]
This thing seems to be in the same vein :
[youtube]http://www.youtube.com/watch?v=RDDH1iqoDzU[/youtube]
Also found something about your idea of balls in the shoes. It's quite weird, not realistic, but could be quite nice for video games still if a solution could be found to have the hands free (maybe only with a harness). Read the comments of the video for more details about how it does work :
[youtube]http://www.youtube.com/watch?v=n3U8enNlhqM[/youtube]
And this last one could be useful coupled to another walking emulation technique, for example in a war FPS where the floor could by made of snow, concrete, sand, mud, etc. :
[youtube]http://www.youtube.com/watch?v=S3P2lKVDMXk[/youtube]
Keep on the discussion going, that's a nice brainstorming to follow...
Found this, perhaps related to what PalmerTech was talking about :
[youtube]http://www.youtube.com/watch?v=4BkY8LGjW4w[/youtube]
This thing seems to be in the same vein :
[youtube]http://www.youtube.com/watch?v=RDDH1iqoDzU[/youtube]
Also found something about your idea of balls in the shoes. It's quite weird, not realistic, but could be quite nice for video games still if a solution could be found to have the hands free (maybe only with a harness). Read the comments of the video for more details about how it does work :
[youtube]http://www.youtube.com/watch?v=n3U8enNlhqM[/youtube]
And this last one could be useful coupled to another walking emulation technique, for example in a war FPS where the floor could by made of snow, concrete, sand, mud, etc. :
[youtube]http://www.youtube.com/watch?v=S3P2lKVDMXk[/youtube]
Keep on the discussion going, that's a nice brainstorming to follow...
-
cybereality
- 3D Angel Eyes (Moderator)
- Posts: 11407
- Joined: Sat Apr 12, 2008 8:18 pm
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
@Fredz: Nice finds on those videos.
Hmm, those ball shoes do not look realistic at all. Seems like the guy is just walking on ice.
Hmm, those ball shoes do not look realistic at all. Seems like the guy is just walking on ice.
-
WiredEarp
- Golden Eyed Wiseman! (or woman!)
- Posts: 1498
- Joined: Fri Jul 08, 2011 11:47 pm
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
@ Aphradonis: you could achieve leg crossing and kicks etc, by having the leg Falcon mounted to another Falcon type arm. With the right articulation combinations, you could allow lots of movements. It would require some quite nifty/tricky software to perform the correct articulation to prevent binding on another control arm, but would definitely be possible. All of this would be part of the gradient of solutions that could be based on the same tech.
You could have a lightweight one that required user supported weight for the home, but arcades could provide systems that did full weight support and provided stronger feedback etc.
Great links Fredz. The first one seemed the best to me, scary stuff however.
Personally, I dont think we should get too hung up on this idea needing to support our weight fully. Of course, if it could, it would be perfect. However, (falling back to my main VR knowledge) remember Lawnmower Man? The full motion solution in that was not weight supporting. They were in a 360 degree hoop harness, so most of the body weight was taken by the harness. If you actually had a hoop harness like that, you could have the falcons on sliding rings and could use them to provide feedback.
The full motion solution in that was not weight supporting. They were in a 360 degree hoop harness, so most of the body weight was taken by the harness. If you actually had a hoop harness like that, you could have the falcons on sliding rings and could use them to provide feedback.
I think for us in a home setting, it will be possible for us to create a Falcon type walking device, safely, IF THE USERS WEIGHT IS SUPPORTED.
If we need to increase the lift capacity to support a human, and have no other harnessing, then we will have massive safety issues and it will cost a LOT more.
I reckon that even a 'walking desk chair' type interface where you sat and moved your feet, like walking a roller chair around, would be more immersive than current, and if we could have a system with a harness or chair (I learn towards the chair, easier to get on and off etc) we would save ourselves much hassle.
In the simpit arena (which we could probably learn something from since these concepts overlap with force feedback simpits) its quite common for home based motion simpits to have most of the weight of the simpit and user supported by counterweights, bungees, etc. This means a tuned simpit can produce strong forces, without having to lift the entire user + simpit.
I have to say, all this talk of walking around inside VR's, both in this thread and PalmerTechs one about his work stage, has really stoked my interest in giving a freewalking VR a try, just to see how much more immersive it must be.
You could have a lightweight one that required user supported weight for the home, but arcades could provide systems that did full weight support and provided stronger feedback etc.
Great links Fredz. The first one seemed the best to me, scary stuff however.
Personally, I dont think we should get too hung up on this idea needing to support our weight fully. Of course, if it could, it would be perfect. However, (falling back to my main VR knowledge) remember Lawnmower Man?
I think for us in a home setting, it will be possible for us to create a Falcon type walking device, safely, IF THE USERS WEIGHT IS SUPPORTED.
If we need to increase the lift capacity to support a human, and have no other harnessing, then we will have massive safety issues and it will cost a LOT more.
I reckon that even a 'walking desk chair' type interface where you sat and moved your feet, like walking a roller chair around, would be more immersive than current, and if we could have a system with a harness or chair (I learn towards the chair, easier to get on and off etc) we would save ourselves much hassle.
In the simpit arena (which we could probably learn something from since these concepts overlap with force feedback simpits) its quite common for home based motion simpits to have most of the weight of the simpit and user supported by counterweights, bungees, etc. This means a tuned simpit can produce strong forces, without having to lift the entire user + simpit.
I have to say, all this talk of walking around inside VR's, both in this thread and PalmerTechs one about his work stage, has really stoked my interest in giving a freewalking VR a try, just to see how much more immersive it must be.
-
WiredEarp
- Golden Eyed Wiseman! (or woman!)
- Posts: 1498
- Joined: Fri Jul 08, 2011 11:47 pm
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
Oh, and that 3rd video is just begging for some chicken dance music.
-
pierreye
- Sharp Eyed Eagle!
- Posts: 377
- Joined: Sat Apr 12, 2008 9:45 pm
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
Looking at the ball shoe video, I think we can scrape the idea. Doesn't look natural and having to hold the rail doesn't work for FPS. Feels like going through physiotherapy after a major accident.
-
Synexious
- Sharp Eyed Eagle!
- Posts: 381
- Joined: Mon Aug 09, 2010 6:08 pm
- Location: Houston
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
So could two Falcons plus a harness be used to create an ODMiP system? Would it really be that simple and cheap? Or would we need bigger Falcon style devices? Someone said the Falcon can move in a one cubic foot volume. Is that enough for natural walking? Certainly not for running. How could we build bigger, heavy-duty Falcons?WiredEarp wrote:I think for us in a home setting, it will be possible for us to create a Falcon type walking device, safely, IF THE USERS WEIGHT IS SUPPORTED.
If we need to increase the lift capacity to support a human, and have no other harnessing, then we will have massive safety issues and it will cost a LOT more.
-
WiredEarp
- Golden Eyed Wiseman! (or woman!)
- Posts: 1498
- Joined: Fri Jul 08, 2011 11:47 pm
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
It would probably be movement enough for walking, but I doubt it would have enough force to provide meaningful feedback. Since its designed for arms, it would probably take twice the power to handle legs, with their greater mass.
The same thing could also be designed to attach to wrists to provide force feed back for arms etc (bit like that Novint XIO, only externally mounted). Of course, the mechanical complexity would mean it wouldn't be feasible except for more highly priced installations.
The same thing could also be designed to attach to wrists to provide force feed back for arms etc (bit like that Novint XIO, only externally mounted). Of course, the mechanical complexity would mean it wouldn't be feasible except for more highly priced installations.
-
Fredz
- Petrif-Eyed
- Posts: 2255
- Joined: Sat Jan 09, 2010 2:06 pm
- Location: Perpignan, France
- Contact:
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
Found two other projects related to walking in VR environments. I also found more info and videos about the first one which didn't convince much people, but this time it looks a little bit better.
This page presents videos of these devices and others related to haptic or locomotion interfaces that were presented at Siggraph, all created in the Virtual Reality Laboratory at the University of Tsukuba in Japan : http://intron.kz.tsukuba.ac.jp/~yano/MA.html" onclick="window.open(this.href);return false;
Virtual Perambulator (1995)
On this one you'll find two MPEG videos of very bad quality, but they show much better than the previous one how the device is able to emulate walking, while wearing an HMD.
http://intron.kz.tsukuba.ac.jp/oldresea ... h/txt.html" onclick="window.open(this.href);return false;
This page describes the experiment at Siggraph 1995 and gives a little bit more details about how it does work :
http://www.siggraph.org/s95/S95_V1/COMU ... RAMBUL.HTL" onclick="window.open(this.href);return false;
Powered Shoes (2006)
Presentation of the project :
http://intron.kz.tsukuba.ac.jp/powereds ... oes_e.html" onclick="window.open(this.href);return false;
The device is in the same vein than the previous one, but without a harness and with more freedom of movement :
[youtube]http://www.youtube.com/watch?v=C5hPyHxrz94[/youtube]
String Walker (2007)
This one presents an original device that does use strings to move the feet to simulate walking ;
http://intron.kz.tsukuba.ac.jp/stringwa ... alker.html" onclick="window.open(this.href);return false;
A video of the device :
[youtube]http://www.youtube.com/watch?v=hyLKjyL-Dw8[/youtube]
This page presents videos of these devices and others related to haptic or locomotion interfaces that were presented at Siggraph, all created in the Virtual Reality Laboratory at the University of Tsukuba in Japan : http://intron.kz.tsukuba.ac.jp/~yano/MA.html" onclick="window.open(this.href);return false;
Virtual Perambulator (1995)
On this one you'll find two MPEG videos of very bad quality, but they show much better than the previous one how the device is able to emulate walking, while wearing an HMD.
http://intron.kz.tsukuba.ac.jp/oldresea ... h/txt.html" onclick="window.open(this.href);return false;
This page describes the experiment at Siggraph 1995 and gives a little bit more details about how it does work :
http://www.siggraph.org/s95/S95_V1/COMU ... RAMBUL.HTL" onclick="window.open(this.href);return false;
Powered Shoes (2006)
Presentation of the project :
http://intron.kz.tsukuba.ac.jp/powereds ... oes_e.html" onclick="window.open(this.href);return false;
The device is in the same vein than the previous one, but without a harness and with more freedom of movement :
[youtube]http://www.youtube.com/watch?v=C5hPyHxrz94[/youtube]
String Walker (2007)
This one presents an original device that does use strings to move the feet to simulate walking ;
http://intron.kz.tsukuba.ac.jp/stringwa ... alker.html" onclick="window.open(this.href);return false;
A video of the device :
[youtube]http://www.youtube.com/watch?v=hyLKjyL-Dw8[/youtube]
-
PalmerTech
- Golden Eyed Wiseman! (or woman!)
- Posts: 1644
- Joined: Fri Aug 21, 2009 9:06 pm
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
Too busy to comment on everything else at the moment, but I saw one of these today, got me thinking.

Edit: Had to add this.

Edit: Had to add this.
-
PalmerTech
- Golden Eyed Wiseman! (or woman!)
- Posts: 1644
- Joined: Fri Aug 21, 2009 9:06 pm
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
Double post, but relevant: Everyone in this thread needs to watch this video of that BF3 simulator, they actually show how the ODT works several minutes in: http://www.youtube.com/watch?feature=pl ... g8Bh5iI2WY" onclick="window.open(this.href);return false;
I hate to admit it, but they did a really good job on this. Best of all? I found out about these things called "Gravity rollers" or "gravity spurs". They use them in assembly lines:

Even more promising? Look at this!

If we could get one that is angled on either side, then we are more than halfway there! I don't have the time at the moment, but these are definitely something to research.
@Fredz: What you posted looks a lot more reasonable. The thing I was remembering was literally two industrial robot arms, big huge ones. I posted that walking machine picture in my last post, seems like a low friction version of one of those might be useful. Still need turning, though.
As far as harnesses go, I have to confess that I am not a fan. You need them for balance/safety, but muscle tension is a very important force for realism. Heck, in the motion simulator world, they make "seat movers" that do nothing by slide you forward and back, left and right in your seat. The steering wheel pulling away from you when you accelerate and pushing towards you when you brake is supposedly a pretty immersive force.
I hate to admit it, but they did a really good job on this.
Even more promising? Look at this!
If we could get one that is angled on either side, then we are more than halfway there! I don't have the time at the moment, but these are definitely something to research.
@Fredz: What you posted looks a lot more reasonable. The thing I was remembering was literally two industrial robot arms, big huge ones.
As far as harnesses go, I have to confess that I am not a fan. You need them for balance/safety, but muscle tension is a very important force for realism. Heck, in the motion simulator world, they make "seat movers" that do nothing by slide you forward and back, left and right in your seat. The steering wheel pulling away from you when you accelerate and pushing towards you when you brake is supposedly a pretty immersive force.
-
cybereality
- 3D Angel Eyes (Moderator)
- Posts: 11407
- Joined: Sat Apr 12, 2008 8:18 pm
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
I'm a little partial to the idea of cyber-shoes. Only because they would seem cheaper and more practical for people with limited space. Its also something that is portable, could be brought places to demo, etc. So I am still holding out for some sort of cyber-shoes. I think even standard roller-blades could be used with the right setup. I mean, if you look at the video of the powershoes, they only move forward and back. As long as you know you cannot strafe with them, its usable. But a circular pod with a roller-floor might feel more realistic. Just trying to find something affordable here, but I love the discussion.
-
Synexious
- Sharp Eyed Eagle!
- Posts: 381
- Joined: Mon Aug 09, 2010 6:08 pm
- Location: Houston
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
I found a loose ball supplier. I'm trying to find pricing. Ball bearings, bought in bulk, as Palmer found, are $2.00 each. The CyberCarpet, which is barely large enough to walk on, uses 4000 balls. So ball bearings cost too much. If loose (probably solid) plastic or rubber balls can be bought for less than a dollar each, they would be affordable. I'd like to have at least 8000 balls, double the Cybercarpet. Then put a rotating treadmill underneath. That would cost maybe one or two thousand at least, though, so maybe the price would end up being the same as with ball bearings, hmm... Maybe a true ODMiP platform can't be built for less than $10,000. Still, $10-15,000 compared to $50,000+ is good. It's something a dedicated uber-enthusiast could save up for.
-
Okta
- Golden Eyed Wiseman! (or woman!)
- Posts: 1515
- Joined: Tue Feb 12, 2008 5:22 am
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
Wow. That sim is brilliant they did an amazing job for sure. I gather they didn't do 3d because the software used to mesh the projectors was not compatible. But that floor system is the bees knees. Any of us could DIY the rest with a decent HMD and some haptic/tracking gadgets but the floor is the key we will always lackPalmerTech wrote:Double post, but relevant: Everyone in this thread needs to watch this video of that BF3 simulator, they actually show how the ODT works several minutes in: http://www.youtube.com/watch?feature=pl ... g8Bh5iI2WY" onclick="window.open(this.href);return false;
Now we have talked over so many methods... The original topic post of the omni bearing mat has high potential, a bearing mat over a normal treadmill that can rotate with the user is all it would take. Unfortunately the research team shown in the vids are still struggling to make it a reality...
Palmer, you have used the Virtusphere yes? http://mashable.com/2010/03/19/vr-hamster-ball/" onclick="window.open(this.href);return false;
I remember you saying it was lack luster but...looking over our other options... i think it still has potential. You have lots of experience casting fibreglass?
"I did not chip in ten grand to seed a first investment round to build value for a Facebook acquisition."
Notch on the FaceDisgrace buyout.
Notch on the FaceDisgrace buyout.
-
brantlew
- Petrif-Eyed
- Posts: 2221
- Joined: Sat Sep 17, 2011 9:23 pm
- Location: Menlo Park, CA
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
That floor is tantalizing. I wish I could see an extended demo of just a lot of walking around on it. It's difficult to tell how good it is from the video. My impressions are that can only handle a medium walking speed at most. There seem to be some minor balance issues that make it look a little unnatural. Still...apparently an untrained person was able to just hop up on it and use it without major issues so that is impressive. It was great to see them constructing it. It's as mechanically simple as we had all envisioned.
-
Okta
- Golden Eyed Wiseman! (or woman!)
- Posts: 1515
- Joined: Tue Feb 12, 2008 5:22 am
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
Looking at that it seems it can be flipped so 8 of those would make a square. If it is large enough and the price it right we are half way there. I wonder if the frame edges sit higher than the rollers which would be an issue. Also a circular plate can go over the centre of the assembly for a base like the BF3 unit. A single motor could drive the lot with either a single speed to keep driving you towards the centre or speed adjusted for distance from centre.PalmerTech wrote: Even more promising? Look at this!
If we could get one that is angled on either side, then we are more than halfway there! I don't have the time at the moment, but these are definitely something to research.
Edit- On second thoughts that would only give 4 directions which would lead to tripping and spinning... 5 or more pie shape sections would be better.
"I did not chip in ten grand to seed a first investment round to build value for a Facebook acquisition."
Notch on the FaceDisgrace buyout.
Notch on the FaceDisgrace buyout.
-
brantlew
- Petrif-Eyed
- Posts: 2221
- Joined: Sat Sep 17, 2011 9:23 pm
- Location: Menlo Park, CA
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
Palmer and Okta: Good finds. Even if that triangular frame could not be used directly, there might be enough raw material in it for a really good start. Specifically you have the rollers already cut to all the sizes you would need. You might just need to get some steel frames to create the "pie" shapes and then cut holes to remounting the rollers.
-
mAchiNE
- Binocular Vision CONFIRMED!
- Posts: 276
- Joined: Wed Sep 01, 2010 7:58 pm
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
As its part of a modular assembly line the frame must sit lower than the rollers so the items traveling on it can pass from one roller module to the next un interupted so this is not an issue.Okta wrote: I wonder if the frame edges sit higher than the rollers which would be an issue.
EDIT: @brantlew I like your Idea about remounting the rollers, not only does it mean the pieces will be the shape we want but also we can minimise the gap between "pie pieces". I guess it all comes down to how expensive they are? because it will need to be paired up with a fairly high spec (probably expensive?) tracking system
Current System:
Oculus Rift Dev Kit, 3x 23" Passive 3D Monitors in 3D Vision Surround, Novint Falcon, 3rd Space Gaming Vest, ButtKicker, Razer Hydra, Logitech G25.
Previous 3D Systems:
Viewsonic PJD6531w 3D DLP Projector, Vuzix VR920, 24" Alienware and 22" Samsung 3D Vision Monitors, eDimensional 3D Glasses with 19" CRT Monitor
Oculus Rift Dev Kit, 3x 23" Passive 3D Monitors in 3D Vision Surround, Novint Falcon, 3rd Space Gaming Vest, ButtKicker, Razer Hydra, Logitech G25.
Previous 3D Systems:
Viewsonic PJD6531w 3D DLP Projector, Vuzix VR920, 24" Alienware and 22" Samsung 3D Vision Monitors, eDimensional 3D Glasses with 19" CRT Monitor
-
mAchiNE
- Binocular Vision CONFIRMED!
- Posts: 276
- Joined: Wed Sep 01, 2010 7:58 pm
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
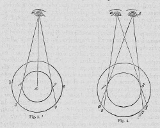
Okay here's an idea and it may be stupid but let me explain anyway, and feel free to point out any flaws I havent thought of....
The "Cyber Carpet" in the OP uses ballbearings with a rotating tredmill underneath to change their direction as the user changes his/hers.
Why cant we just do away with the ballbearings and just have a rotating treadmill? the tread mill would have to be about twice as wide as a normal tredmill so when turning you dont step off it, providing the input lag between the time you turn and the time it takes the tredmill to follow suit is very small, then after turning you should self correct when walking straight. a small sationary hoop around your waist mounted outside the tredmill would help to keep you centred and ensure you can't come off the tredmill when turning (should you turn to sharply and the tredmill not adjust fast enough). I think this design should be easily done in a DIY setup and whould provide for the most part natural locomotion and forces.
here are some of the downsides I can think of for such a design:
- No Strafeing (could use leaning gesture to strafe?)
- Sudden sharp turns (this is also a problem with most other DIY soloutions such as passive ballbearing shoes or carpet)
Sorry for my crappy drawing
The "Cyber Carpet" in the OP uses ballbearings with a rotating tredmill underneath to change their direction as the user changes his/hers.
Why cant we just do away with the ballbearings and just have a rotating treadmill? the tread mill would have to be about twice as wide as a normal tredmill so when turning you dont step off it, providing the input lag between the time you turn and the time it takes the tredmill to follow suit is very small, then after turning you should self correct when walking straight. a small sationary hoop around your waist mounted outside the tredmill would help to keep you centred and ensure you can't come off the tredmill when turning (should you turn to sharply and the tredmill not adjust fast enough). I think this design should be easily done in a DIY setup and whould provide for the most part natural locomotion and forces.
here are some of the downsides I can think of for such a design:
- No Strafeing (could use leaning gesture to strafe?)
- Sudden sharp turns (this is also a problem with most other DIY soloutions such as passive ballbearing shoes or carpet)
Sorry for my crappy drawing
You do not have the required permissions to view the files attached to this post.
Current System:
Oculus Rift Dev Kit, 3x 23" Passive 3D Monitors in 3D Vision Surround, Novint Falcon, 3rd Space Gaming Vest, ButtKicker, Razer Hydra, Logitech G25.
Previous 3D Systems:
Viewsonic PJD6531w 3D DLP Projector, Vuzix VR920, 24" Alienware and 22" Samsung 3D Vision Monitors, eDimensional 3D Glasses with 19" CRT Monitor
Oculus Rift Dev Kit, 3x 23" Passive 3D Monitors in 3D Vision Surround, Novint Falcon, 3rd Space Gaming Vest, ButtKicker, Razer Hydra, Logitech G25.
Previous 3D Systems:
Viewsonic PJD6531w 3D DLP Projector, Vuzix VR920, 24" Alienware and 22" Samsung 3D Vision Monitors, eDimensional 3D Glasses with 19" CRT Monitor
-
Synexious
- Sharp Eyed Eagle!
- Posts: 381
- Joined: Mon Aug 09, 2010 6:08 pm
- Location: Houston
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
Why can't you turn sharply with ball bearing shoes or a carpet? The balls are omnidirectional.
-
mAchiNE
- Binocular Vision CONFIRMED!
- Posts: 276
- Joined: Wed Sep 01, 2010 7:58 pm
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
maybe you are right, but I would think you might fall over if your weight is not supported, in the video fredz posted it looked very hard and unnatural to walk in the ballbearing shoes. I think walking on a treadmill should be much more natural than on the bearings but as I have not tried either I might be wrong.
Current System:
Oculus Rift Dev Kit, 3x 23" Passive 3D Monitors in 3D Vision Surround, Novint Falcon, 3rd Space Gaming Vest, ButtKicker, Razer Hydra, Logitech G25.
Previous 3D Systems:
Viewsonic PJD6531w 3D DLP Projector, Vuzix VR920, 24" Alienware and 22" Samsung 3D Vision Monitors, eDimensional 3D Glasses with 19" CRT Monitor
Oculus Rift Dev Kit, 3x 23" Passive 3D Monitors in 3D Vision Surround, Novint Falcon, 3rd Space Gaming Vest, ButtKicker, Razer Hydra, Logitech G25.
Previous 3D Systems:
Viewsonic PJD6531w 3D DLP Projector, Vuzix VR920, 24" Alienware and 22" Samsung 3D Vision Monitors, eDimensional 3D Glasses with 19" CRT Monitor
-
brantlew
- Petrif-Eyed
- Posts: 2221
- Joined: Sat Sep 17, 2011 9:23 pm
- Location: Menlo Park, CA
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
Hmmm. I think a system like this would work well with a non-erratic pathway. So if you were just strolling along making slow adjustments to your path I think the rotational side-effect would be negligible. I think with a really erratic pattern (ie. side stepping), the system might "fight" you. I keep envisioning a quick turn to the right, and then the floor would keep twisting me a quarter turn.mAchiNE wrote:Why cant we just do away with the ballbearings and just have a rotating treadmill?
-
KydDynoMyte
- One Eyed Hopeful
- Posts: 18
- Joined: Wed May 12, 2010 2:14 pm
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
That industrial gravity conveyor might be too heavy duty. In the video it looks to me more like the pvc roller conveyor on the check out lanes like at a big box store like BJ's. They make smaller (thinner rollers) industrial conveyors called Carton Flow or Span-Trak. But the kind in the checkout lanes seems like the tighter spacing between rollers would work out better. Probably easier to get the size cut down to where you want if it's just a PVC tube over a steel shaft. The industrial roller conveyors won't be easy to get made short enough for the point of the wedge. The girl in the video seems to make sure to step over the division in the conveyors also and not step on the break. I imagine it wouldn't roll as smooth when stepping on the break since the 2 sets of rollers rollers would be at slightly different angles.
-
brantlew
- Petrif-Eyed
- Posts: 2221
- Joined: Sat Sep 17, 2011 9:23 pm
- Location: Menlo Park, CA
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
Reality check...at the cost (~$5K), size, and complexity level that we have been converging towards, I wonder if it would make sense just to build a DIY VirtuSphere? I mean, the size of this latest gadget (the BF3 sim floor) is at least 10ft in diameter and it's got a fair number of mechanical and motorized parts to deal with. You could just skip all that and go with the sphere which doesn't need any motorization or control mechanism. You would need to be a pretty good welder, but that's about it.
-
brantlew
- Petrif-Eyed
- Posts: 2221
- Joined: Sat Sep 17, 2011 9:23 pm
- Location: Menlo Park, CA
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
I wonder what the minimum size for a VR sphere needs to be? I wonder if a 7 ft diameter one would work? That would leave 1 ft on the bottom for the rollers. Your walk would be more uphill, but that's a big space savings and something that could at least fit in a garage. (Lucky people with 10 ft ceilings could build 9ft spheres) I ran across a few links that if not useful - are at least inspirational.
http://www.geo-dome.co.uk/article.asp?u ... build_tech
http://www.frameconnector.com/ Check out that FLEX-C TRAC !!
http://www.geodesicframe.com/
http://domekits.info/preview_002.htm
http://www.geo-dome.co.uk/article.asp?u ... build_tech
http://www.frameconnector.com/ Check out that FLEX-C TRAC !!
http://www.geodesicframe.com/
http://domekits.info/preview_002.htm
-
mAchiNE
- Binocular Vision CONFIRMED!
- Posts: 276
- Joined: Wed Sep 01, 2010 7:58 pm
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
If we were to try build a diy VirtuSphere then could we use something like this:
http://www.zorb.com.cn/water-ball/index.htm" onclick="window.open(this.href);return false;
instead of a metal sphere, it might solve some of the momentum problems of the metal sphere
EDIT: and they come in up to 3m diameter (about 9.8ft) plus could be folded down when not in use to save space! I've emailed them for pricing I'll post here when I here back
http://www.zorb.com.cn/water-ball/index.htm" onclick="window.open(this.href);return false;
instead of a metal sphere, it might solve some of the momentum problems of the metal sphere
EDIT: and they come in up to 3m diameter (about 9.8ft) plus could be folded down when not in use to save space! I've emailed them for pricing I'll post here when I here back
You do not have the required permissions to view the files attached to this post.
Last edited by mAchiNE on Tue Oct 25, 2011 5:22 pm, edited 1 time in total.
Current System:
Oculus Rift Dev Kit, 3x 23" Passive 3D Monitors in 3D Vision Surround, Novint Falcon, 3rd Space Gaming Vest, ButtKicker, Razer Hydra, Logitech G25.
Previous 3D Systems:
Viewsonic PJD6531w 3D DLP Projector, Vuzix VR920, 24" Alienware and 22" Samsung 3D Vision Monitors, eDimensional 3D Glasses with 19" CRT Monitor
Oculus Rift Dev Kit, 3x 23" Passive 3D Monitors in 3D Vision Surround, Novint Falcon, 3rd Space Gaming Vest, ButtKicker, Razer Hydra, Logitech G25.
Previous 3D Systems:
Viewsonic PJD6531w 3D DLP Projector, Vuzix VR920, 24" Alienware and 22" Samsung 3D Vision Monitors, eDimensional 3D Glasses with 19" CRT Monitor
-
brantlew
- Petrif-Eyed
- Posts: 2221
- Joined: Sat Sep 17, 2011 9:23 pm
- Location: Menlo Park, CA
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
It seems like the material needs to be able to support your weight so your feet don't tear through it. I wonder if you could this balloon as a mold for fiberglass? A fiberglass ball could support your weight and would roll much better than a geodesic.
-
mAchiNE
- Binocular Vision CONFIRMED!
- Posts: 276
- Joined: Wed Sep 01, 2010 7:58 pm
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
Yes it would be more fragile than fibreglass, but possibly less fragile than it looks, it is pressurised from the inside so should hold its shape and is 1mm thick heavy duty PVC, it holds weight of people wlaking in it on water so maybe we could put it in a paddling pool? it can come with different patterns on it so that chould possibly help with optical tracking of the shpere? I'm just trying to come up with simpler ideas than building a 8ft sphere from scratch, I think if I was to buy one of these I'd see if I could use it as is but if that did not work then the idea of using it as a mold to make a fibreglass sphere is a great backup idea!
Current System:
Oculus Rift Dev Kit, 3x 23" Passive 3D Monitors in 3D Vision Surround, Novint Falcon, 3rd Space Gaming Vest, ButtKicker, Razer Hydra, Logitech G25.
Previous 3D Systems:
Viewsonic PJD6531w 3D DLP Projector, Vuzix VR920, 24" Alienware and 22" Samsung 3D Vision Monitors, eDimensional 3D Glasses with 19" CRT Monitor
Oculus Rift Dev Kit, 3x 23" Passive 3D Monitors in 3D Vision Surround, Novint Falcon, 3rd Space Gaming Vest, ButtKicker, Razer Hydra, Logitech G25.
Previous 3D Systems:
Viewsonic PJD6531w 3D DLP Projector, Vuzix VR920, 24" Alienware and 22" Samsung 3D Vision Monitors, eDimensional 3D Glasses with 19" CRT Monitor
-
brantlew
- Petrif-Eyed
- Posts: 2221
- Joined: Sat Sep 17, 2011 9:23 pm
- Location: Menlo Park, CA
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
Don't forget the caster wheels that it rolls on. You would have to use a lot of them to prevent tearing it seems. I think the fiber glass is a safer bet but I'm open to solutions with plastic (or maybe canvas). Here is my back-of-napkin idea for building a sphere.
Use a large spherical balloon as a fiber-glass mold. Then create a wooden bowl shaped scafolding and attach several large caster wheels with the wheels facing upwards. Cut the ball into 8 pieces (so it can be stored) and reattach the seams with a bunch of brackets. Cover the surface with 1/2 inch diameter holes for ventilation. Cut a door and reattach using brackets (maybe hinges). Implement roll tracking using your favorite method - maybe track the casters, maybe use an optical method.
Surely that would all cost less than $500.
Use a large spherical balloon as a fiber-glass mold. Then create a wooden bowl shaped scafolding and attach several large caster wheels with the wheels facing upwards. Cut the ball into 8 pieces (so it can be stored) and reattach the seams with a bunch of brackets. Cover the surface with 1/2 inch diameter holes for ventilation. Cut a door and reattach using brackets (maybe hinges). Implement roll tracking using your favorite method - maybe track the casters, maybe use an optical method.
Surely that would all cost less than $500.
-
Okta
- Golden Eyed Wiseman! (or woman!)
- Posts: 1515
- Joined: Tue Feb 12, 2008 5:22 am
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
http://www.ebay.com.au/itm/Tizip-zipper ... 1c12cc33ff" onclick="window.open(this.href);return false;
Under $400 shipped for the ball. There is a video, it is impossible to walk in (or even stand up) not good for a HMD and wearable computer setup. Even worse im sure these will leak. Plus you need someone to inflate it from the outside. I alslo dont have hops for the longevity of the materials.
That being said i think it has potential. placed in a wading pool as noted Machine, then having some caster wheels mounted around it to slow its rotating speed, hold it in place and use the wheels as movement measures.
The there are Play Domes http://www.playdomes.com/reviews.php" onclick="window.open(this.href);return false;
2 of these bolted together with fibreglass shells riveted to the outside?
Under $400 shipped for the ball. There is a video, it is impossible to walk in (or even stand up) not good for a HMD and wearable computer setup. Even worse im sure these will leak. Plus you need someone to inflate it from the outside. I alslo dont have hops for the longevity of the materials.
That being said i think it has potential. placed in a wading pool as noted Machine, then having some caster wheels mounted around it to slow its rotating speed, hold it in place and use the wheels as movement measures.
The there are Play Domes http://www.playdomes.com/reviews.php" onclick="window.open(this.href);return false;
2 of these bolted together with fibreglass shells riveted to the outside?
"I did not chip in ten grand to seed a first investment round to build value for a Facebook acquisition."
Notch on the FaceDisgrace buyout.
Notch on the FaceDisgrace buyout.
-
mAchiNE
- Binocular Vision CONFIRMED!
- Posts: 276
- Joined: Wed Sep 01, 2010 7:58 pm
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
Sounds like a reasonable soloution, I supose your $500 price tag assumes the balloon used for the mold is very cheap, even brackets and fixings to reassemble the 8 pieces would add up quickly, plus there is a fairly large amount of fibreglass required. I think under $1000 is more realistic (assuming the balloon is not more than $300)
Being inside a sphere reqires everything inside the shpere to be wireless so WHDI or Laptop backpack is required for this soloution, direction tracking (up/down aiming and left right turning) can be achieved using the aiming/headtracking device, but how do you suggest tracking foward/back and strafe motions? inside a sphere we will not be able to use Kinect for limb tracking (unless the shpere is very transparent?) so that leaves castor tracking/optical tracking of the sphere, speed information can easily be taken from this but how can we track weather or not we are going foward or backwards? and strafing? (i.e. when the shpere is rolling in one direction and stops and starts goning in the opposite direction how does the tracking method know if you have done a 180deg turn or if you are now walking backwards?) The only thing I can think of is the combination of what the shpere is doing with the direction information from the tracker (aiming tracker) inside. so the software must compare which direction you are facing with which direction the shpere is moving to decide what action you are making. i.e. same scenario as before, when the shpere is rolling in one direction and stops and starts going in the opposite direction, the software sees that you were facing in the same direction the whole time [same direction as the original sphere movement] then when the sphere starts going in the opposite direction then you must be walking backwards, OR if your direction changes to that of the new spheres direction then you must have done a 180deg turn. The same logic can be used to determine weather you are turning left or right or strafing left or right.
So this would require some custom software and "off the shelf" tracking soloutions would not work. I am not a software guy so the question is for those of you who are is this kind of software easy to make? if so we might have a reasonable soloution here (although not ideal due to most peoples space limitations)
Being inside a sphere reqires everything inside the shpere to be wireless so WHDI or Laptop backpack is required for this soloution, direction tracking (up/down aiming and left right turning) can be achieved using the aiming/headtracking device, but how do you suggest tracking foward/back and strafe motions? inside a sphere we will not be able to use Kinect for limb tracking (unless the shpere is very transparent?) so that leaves castor tracking/optical tracking of the sphere, speed information can easily be taken from this but how can we track weather or not we are going foward or backwards? and strafing? (i.e. when the shpere is rolling in one direction and stops and starts goning in the opposite direction how does the tracking method know if you have done a 180deg turn or if you are now walking backwards?) The only thing I can think of is the combination of what the shpere is doing with the direction information from the tracker (aiming tracker) inside. so the software must compare which direction you are facing with which direction the shpere is moving to decide what action you are making. i.e. same scenario as before, when the shpere is rolling in one direction and stops and starts going in the opposite direction, the software sees that you were facing in the same direction the whole time [same direction as the original sphere movement] then when the sphere starts going in the opposite direction then you must be walking backwards, OR if your direction changes to that of the new spheres direction then you must have done a 180deg turn. The same logic can be used to determine weather you are turning left or right or strafing left or right.
So this would require some custom software and "off the shelf" tracking soloutions would not work. I am not a software guy so the question is for those of you who are is this kind of software easy to make? if so we might have a reasonable soloution here (although not ideal due to most peoples space limitations)
Current System:
Oculus Rift Dev Kit, 3x 23" Passive 3D Monitors in 3D Vision Surround, Novint Falcon, 3rd Space Gaming Vest, ButtKicker, Razer Hydra, Logitech G25.
Previous 3D Systems:
Viewsonic PJD6531w 3D DLP Projector, Vuzix VR920, 24" Alienware and 22" Samsung 3D Vision Monitors, eDimensional 3D Glasses with 19" CRT Monitor
Oculus Rift Dev Kit, 3x 23" Passive 3D Monitors in 3D Vision Surround, Novint Falcon, 3rd Space Gaming Vest, ButtKicker, Razer Hydra, Logitech G25.
Previous 3D Systems:
Viewsonic PJD6531w 3D DLP Projector, Vuzix VR920, 24" Alienware and 22" Samsung 3D Vision Monitors, eDimensional 3D Glasses with 19" CRT Monitor
-
mAchiNE
- Binocular Vision CONFIRMED!
- Posts: 276
- Joined: Wed Sep 01, 2010 7:58 pm
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
Looks like it has potential, will it roll well enough with that shape I wonder?Okta wrote: The there are Play Domes http://www.playdomes.com/reviews.php" onclick="window.open(this.href);return false;
2 of these bolted together with fibreglass shells riveted to the outside?
Current System:
Oculus Rift Dev Kit, 3x 23" Passive 3D Monitors in 3D Vision Surround, Novint Falcon, 3rd Space Gaming Vest, ButtKicker, Razer Hydra, Logitech G25.
Previous 3D Systems:
Viewsonic PJD6531w 3D DLP Projector, Vuzix VR920, 24" Alienware and 22" Samsung 3D Vision Monitors, eDimensional 3D Glasses with 19" CRT Monitor
Oculus Rift Dev Kit, 3x 23" Passive 3D Monitors in 3D Vision Surround, Novint Falcon, 3rd Space Gaming Vest, ButtKicker, Razer Hydra, Logitech G25.
Previous 3D Systems:
Viewsonic PJD6531w 3D DLP Projector, Vuzix VR920, 24" Alienware and 22" Samsung 3D Vision Monitors, eDimensional 3D Glasses with 19" CRT Monitor
-
KydDynoMyte
- One Eyed Hopeful
- Posts: 18
- Joined: Wed May 12, 2010 2:14 pm
Re: Envisioning a DIY CyberCarpet for Omnidirectional Motion
Ever since I saw the virtual sphere on that Shark's Tank tv show a few months ago I thought how much better it'd be made out of rear projection material so you could ditch the HMD. mAchiNE's paddling pool idea is brilliant.