Hello guys,
I have read this thread and here are few of my notes.
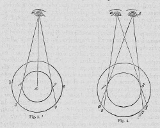
I recommend that you have a look at this old article from Polhemus:
http://resenv.media.mit.edu/classes/MAS ... rticle.pdf
It explains how magnetic tracking works. It is an old article, but the magnetic technology is ancient. All magnetic trackers work like this. The AC/DC difference is an irrelevant detail, the measurement works still the same. AFAIK, the current holder of the patents is Sixsense - that is the company Razer has licensed the tech from, the same as Polhemus and Ascension. This could actually preclude an "open-source" implementation - the moment you start selling a kit (or anything) you get hit with a lawsuit - they are known to be very strict about enforcing their patents. It could be an interesting engineering and learning exercise, but considering that the Hydra costs ~100 EUR, it doesn't make a lot of sense to do it from scratch if you are looking for a cheap tracker.
Once you read that paper, you will realize that something like an Arduino is *not* going to cut it. You need a powerful CPU with good floating point support - that's why there is the Blackfin in the Hydra. The MotionStar/Flock of Birds contains actually a regular Pentium PC in that big box. You could potentially offload that calculation to the host PC, but most likely it would be too laggy - by the time you managed to send everything to the host, the sensor would have moved already and you still need to do the calculations. There are also lots of measurements that have to be taken with very tight timing constraints to be able to calculate position and orientation - so you would need a relatively powerful computer in the device anyway. I haven't seen a magnetic system that does this on the host and I am certain that someone would have done it already if it was possible. It is a lot cheaper to do calculations in the driver on a PC than having to embed a DSP - the cost of a DSP development is perhaps 10x higher due to it being specialized, hard to find skill.
I laughed at the note about someone liking wood for enclosures too in the MotionStar emitter teardown - that *must* be non-metallic enclosure, that cube contains the emitter coils (equivalent to the "ball" on the Hydra) and any metal would seriously hamper its functioning! It also must be very rigid, because misalignment of the coils would cause accuracy problems. Considering that the cube weighs ~20kg, most plastic is out as well, leaving you with wood. It isn't meant to be a portable system anyway.
Re differences with Hydra - actually not that many, just a Blackfin micro/DSP instead of an embedded PC - there weren't any affordable DSPs or powerful-enough micros available back in the 90s when MotionStar was designed, moreover the system has an Ethernet and TCP/IP connectivity - not something you could find in microcontrollers of the era. The emitter is larger - but we are also talking about a device with a 3m working range (6m if the cube is in the center, if I remember right). And it can actually drive two of those cubes working in tandem, for an even larger working space. So you need a lot of current (that's why there is the second, smaller box - it contains the coil drivers) and big coils + some hefty thick wiring. The MotionStars and Flock of Birds could use a smaller, short range emitter (e.g. for desktop use, like with an HMD), I believe that one doesn't need that second driver box - not 100% sure about it.
Re sensors - you pretty much have to use coils. MEMS sensors aren't going to cut it, because they don't have that fast response times. They are also built to sense tiny magnetic fields - like a field of a permanent magnet or the Earth. With something like MotionStar we are talking about a field that causes strong interference on CRT screens behind a wall in the next office - some 6 meters away. It needs to be that strong, otherwise you won't have sufficient range (problem of the weak coils in the Hydra - field intensity falls with the square of the distance) and interference in the workspace (metal, transformers, etc.) would distort the field heavily (again problem with the Hydra). You could potentially use Hall sensors, but those would need a ton of current, it is not practical to use them for this sort of application, especially if the sensors are wireless.
I have some more info on how Hydra works on my website:
http://janoc.rd-h.com/archives/212
Regards,
Jan
P.S.: It is better to contact me by e-mail or on the VRGeeks mailing list, I am not following this forum regularly