Page 1 of 3
Locomotion attempt
Posted: Tue Jan 29, 2013 7:33 pm
by JanVR
Hi all,
I wanted to share a project that I have been working on since the last couple of months. I truly believe that walking on a locomotion device vastly increases immersion in VR environments, especially with an HMD like the Rift. After a couple of conversations with Julian from Wizdish, I decided to start building this experiment. It works well, feels natural, and could fit in someone’s living room (this set-up is quite large, but I believe it can be done much smaller and lower). What do you think? Curious to hear your thoughts.
http://youtu.be/qg7NB5YDuY4
Re: Locomotion attempt
Posted: Tue Jan 29, 2013 7:45 pm
by colocolo
This device is great. Looks very natural and simple. Brilliant. How does it work? Are those shoes the Wizdish shoes?
That concept could really make it into peoples homes.
I guess it has not many parts.
Great Work, keep it up.

Re: Locomotion attempt
Posted: Tue Jan 29, 2013 7:46 pm
by Fredz
It looks a lot like the Virtual Perambulator, but for some reason it does still look better. Not entirely natural walking either, but quite close to it. What's the principle behind it, sliding floor or sliding shoes ?
The Virtual Perambulator :
http://www.hitl.washington.edu/publications/r-96-4/

Re: Locomotion attempt
Posted: Tue Jan 29, 2013 7:49 pm
by MrGreen
Random thoughts.
- The walking looks a lot more natural than on the Wizdish
- Do you really need to hold yourself that much?
- It's pretty noisy.
- I wanna try it!
Re: Locomotion attempt
Posted: Tue Jan 29, 2013 8:26 pm
by MSat
Cool! Something like this is more ideal for a low friction surface like the wizdish rather than just shimmying around with no support, IMO.
I might sound like a broken record, as I've mentioned it several times now, but I think a more ideal configuration would be if your body was held in place by a fixed backpack harness, allowing a more natural sense of walking in addition to it being completely hands free. Another benefit to such a harness is that the "tugging" force your body would exert on it would be similar to the feel of trying to move with a heavy-ish backpack due to its inertia, and in a sense imitate natural acceleration forces. Because it uses a harness, it also has an inherent safety mechanism, not to mention that the whole system could likely be smaller because of the naturally limited area your legs would be able to cover if your body is kept in one place. Just a thought.

Re: Locomotion attempt
Posted: Tue Jan 29, 2013 8:44 pm
by JanVR
MSat, you are exactly right. I am already working on a waist support assembly that will make the device completely hands free, and also smaller.
Colocolo, Fredz: the platform surface has grooves, and the shoe sole has a corresponding plunger pin at the bottom that fits into these grooves, to prevent your foot from sliding all over the place (as if you were walking on ice). As such, the walking movement is stable and natural.
Next on my list is to shoot a video when I try this device with VR glasses and the Kinect in a game environment (the Kinect tracks the walking motion and steers the avatar in the virtual world).
Re: Locomotion attempt
Posted: Tue Jan 29, 2013 9:20 pm
by brantlew
The device looks really interesting JanVR! The foot motion is realistic and would seem to accommodate other motions like backwards walking and side stepping. If you can figure out a good harness/balancing solution I think the device has great potential.
Re: Locomotion attempt
Posted: Tue Jan 29, 2013 9:27 pm
by cybereality
This is looking great. Better than the Wizdish, or at least more natural walking motion.
I'll be watching this space.
Re: Locomotion attempt
Posted: Tue Jan 29, 2013 10:24 pm
by MrGreen
JanVR wrote:MSat, you are exactly right. I am already working on a waist support assembly that will make the device completely hands free, and also smaller.
Colocolo, Fredz: the platform surface has grooves, and the shoe sole has a corresponding plunger pin at the bottom that fits into these grooves, to prevent your foot from sliding all over the place (as if you were walking on ice). As such, the walking movement is stable and natural.
Next on my list is to shoot a video when I try this device with VR glasses and the Kinect in a game environment (the Kinect tracks the walking motion and steers the avatar in the virtual world).
Very promising stuff Jan! Looking forward to see more.
Re: Locomotion attempt
Posted: Tue Jan 29, 2013 10:32 pm
by geekmaster
Your video makes me want to build this SO BAD. Sadly, the only open spaces to put this are disallowed by the spouse. I like the idea of something link a Wizdish that can fit under a bed when not in use, but not having tried one, your virtual perambulator appears more natural when comparing videos of them in use. Perhaps a smaller version of yours could fold down and fit under a bed -- something to consider for future development.
Re: Locomotion attempt
Posted: Wed Jan 30, 2013 7:45 am
by Leahy
Nice work! I was not very impressed by the Wizdish but I'd buy this for sure if you end up making it a commercial product. At least after the spouse gives me permission
Re: Locomotion attempt
Posted: Wed Jan 30, 2013 1:00 pm
by virror
Looks very promising, feel like sharing some detail about how it works? : p
Re: Locomotion attempt
Posted: Wed Jan 30, 2013 1:26 pm
by Bishop51
NICE! If you can get the footprint down and find an elegant solution for the waist support, this is half-way to a commercial product (or some kind of open source project). If this doesn't hit the market, I'll be making one!
Re: Locomotion attempt
Posted: Wed Jan 30, 2013 1:43 pm
by jayoh
god damn this is cool.
Re: Locomotion attempt
Posted: Wed Jan 30, 2013 1:57 pm
by Aabel
Looks cool and very promising at this early stage. However I am concerned that your balance appears to be all over the place, that could be a problem. Keep up the good work this is definitely the most promising VR locomotion device I have seen, in size and function. Even better that you hope to get it smaller, if you can come up with an elegant solution to require less extreme balance adjustments and making the support circle as un-obtrusive as possible and avoid a harness you might be have something that is commercially viable for the emerging consumer VR market.
Re: Locomotion attempt
Posted: Wed Jan 30, 2013 2:27 pm
by mindless
very nice design, very functional without being over complicated. thats a neat piece of kit you got there.
Re: Locomotion attempt
Posted: Wed Jan 30, 2013 3:40 pm
by cert
it looks nice, can you try it without using your hands?
Re: Locomotion attempt
Posted: Wed Jan 30, 2013 4:01 pm
by rhinosix
This looks really promising! Great work!
I'd love to see something like this with a harness to both keep you in place, and to keep you suspended in the air when you jump.
Re: Locomotion attempt
Posted: Wed Jan 30, 2013 4:03 pm
by STRZ
cert wrote:it looks nice, can you try it without using your hands?
Probably if he designs a sort of mechanism where the wooden ring functions like a enclosure holding your hip. For beeing able to turn, he could make a inner ring gliding on a outer ring rail mechanism.
Re: Locomotion attempt
Posted: Wed Jan 30, 2013 4:15 pm
by android78
STRZ wrote:cert wrote:it looks nice, can you try it without using your hands?
Probably if he designs a sort of mechanism where the wooden ring functions like a enclosure holding your hip. For beeing able to turn, he could make a inner ring gliding on a outer ring rail mechanism.
I wonder if it could be better to have the harness holding the body static and a rotating platform. If the platform was weighted appropriately, it could reasonably simulate the body rotating and would avoid needing a wireless HMD. The only thing is that you wouldn't feel the turning as you would having a static platform.
Re: Locomotion attempt
Posted: Wed Jan 30, 2013 5:08 pm
by MSat
android78 wrote:STRZ wrote:cert wrote:it looks nice, can you try it without using your hands?
Probably if he designs a sort of mechanism where the wooden ring functions like a enclosure holding your hip. For beeing able to turn, he could make a inner ring gliding on a outer ring rail mechanism.
I wonder if it could be better to have the harness holding the body static and a rotating platform. If the platform was weighted appropriately, it could reasonably simulate the body rotating and would avoid needing a wireless HMD. The only thing is that you wouldn't feel the turning as you would having a static platform.
I'm thinking a non-rotating platform would suffice. Imagine if you were wearing a backpack harness that held your body in place and you tried to turn left - with some friction between between your feet and the floor, your right shoulder would be pulling into the shoulder strap while the left side of your back would be pushing into the back of the harness. Fill up a regular backpack with a bunch of books and turn to the left - you should experience a similar sensation. Unless you spin around quickly, your inner ear isn't likely to really sense you turning. If anything, it's the process of moving your legs that would be the most convincing aspect.
Re: Locomotion attempt
Posted: Wed Jan 30, 2013 5:27 pm
by STRZ
android78 wrote:
I wonder if it could be better to have the harness holding the body static and a rotating platform. If the platform was weighted appropriately, it could reasonably simulate the body rotating and would avoid needing a wireless HMD. The only thing is that you wouldn't feel the turning as you would having a static platform.
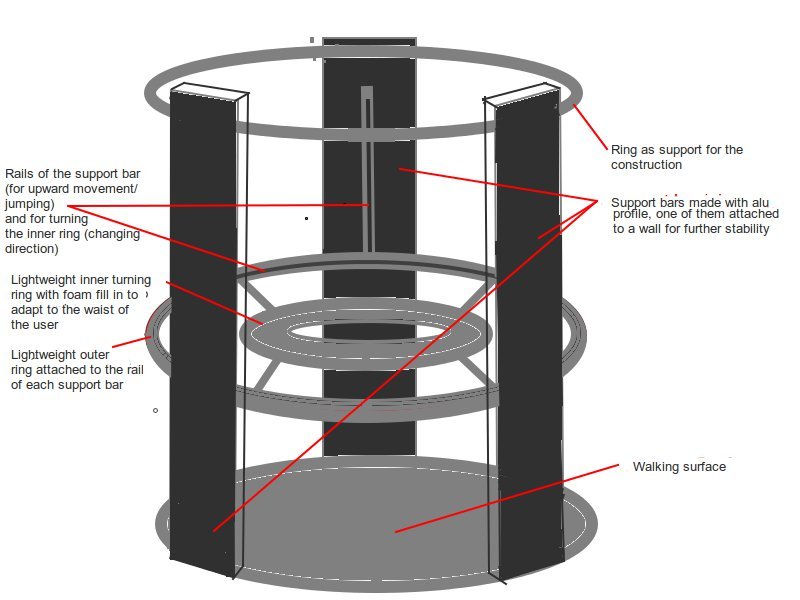
Considering the "walking on ice" gliding priciple i'd build a cage with aluminium 80/40 profiles and fasten the ring/harness to each corner, with the profiles of the cage acting as rails for upward movement (for jumping, ducking won't be possible because you'd need low friction for walking). Turning would be possible with a inner ring/outer ring combination which act as a harness enclosing/holding your hip, this way with the fastening of the outer ring to the rails of the cage, you maintain the low friction needed when walking back and fowards or to the sides because its stiff in those directions and you avoid too much pressure on the surface, in the video he posted you see that he needs to support himself to get the low friction.
To avoid a wireless HMD, you could guide the cable from the Rift controller box downwards from the center of the cage. If you implement sensors on the cage profiles and the ring, you could track jumping and turning.
I can make a simple drwing to explain the idea a bit better.
Edit:
Re: Locomotion attempt
Posted: Wed Jan 30, 2013 11:11 pm
by JanVR
Thanks all for the encouragements.
STRZ, I am working on a waist support assembly that would make the device fully hands free. I hope to demonstrate it this weekend. Basically, the user would wear a belt with horizontal flanges that extend horizontally outward and radially from the belt, extending over the platform ring, thus providing upward support while not being attached to the ring. Two additional vertical bumpers within the ring provide radial support. I am probably not very clear, but I hope I can show you soon. This assembly will be uncomplicated (power in simplicity), and will not prevent the user from freely rotating, jumping, or walking naturally in 360 degrees.
I shot the following video with a screen capturing program and webcam. I am wearing a pair of Vuzix glasses and using the Kinect to track my movements. The feeling of immersion when walking in a game is fantastic. A whole lot of fun and excitement. Imagine this set-up with the Rift. I think your brain would truly believe that you are in a different world. It’s mind blowing.
http://www.youtube.com/watch?v=UpqyHDMVFp8
[youtube]
http://www.youtube.com/watch?v=UpqyHDMVFp8[/youtube]
To Geekmaster’s, Bishop’s and Aabel’s comments: I believe the device can be made much smaller and lower. This prototype is too big. As you can see in the video, I don’t nearly use all the walking surface. A smaller support ring and constraining support harness will allow to make it even smaller. Should not be difficult either to allow for easy disassembly by the user, so that it can be stored under a bed or in a closet.
To Brantlew’s comment earlier, the device indeed allows for strafing, backwards stepping, jumping, and even running. I’ll shoot another video to illustrate. Hopefully the waist support assembly is ready to demo this weekend. Imagine carrying a gun or other game controller while walking freely in the virtual world – then the fun really starts. Will keep you all posted on my progress! Thanks for all the support.
Re: Locomotion attempt
Posted: Wed Jan 30, 2013 11:15 pm
by brantlew
I wonder about the harness system preventing natural arm swing. It seems most designs have some sort of radial support structures which would seem to catch your arms. Anxious to see your design in action.
Re: Locomotion attempt
Posted: Thu Jan 31, 2013 1:19 am
by STRZ
JanVR wrote:Thanks all for the encouragements.
STRZ, I am working on a waist support assembly that would make the device fully hands free. I hope to demonstrate it this weekend. Basically, the user would wear a belt with horizontal flanges that extend horizontally outward and radially from the belt, extending over the platform ring, thus providing upward support while not being attached to the ring. Two additional vertical bumpers within the ring provide radial support. I am probably not very clear, but I hope I can show you soon. This assembly will be uncomplicated (power in simplicity), and will not prevent the user from freely rotating, jumping, or walking naturally in 360 degrees.
I get it, sounds very interesting. Personally i'm researching foot controls while beeing seated and currently still in the brainstorming stage. I think both classes of devices will be needed, very precise and effective controls to compete with mouse and keyboard users and locomotion rigs for immersion.
I shot the following video with a screen capturing program and webcam. I am wearing a pair of Vuzix glasses and using the Kinect to track my movements. The feeling of immersion when walking in a game is fantastic. A whole lot of fun and excitement. Imagine this set-up with the Rift. I think your brain would truly believe that you are in a different world. It’s mind blowing.
http://www.youtube.com/watch?v=UpqyHDMVFp8
Nice! Way better than wizdish and probably more affordable than those cyberwalks. I'll buy one. I know some DIY people in other areas who have a business model consisting in selling assembly manuals for a few bucks and linking to dealers who have all the parts someone would need in stock, getting some money there too through customer reference. This could work for such a huge device if you want to "ship" it all over the world without hassle.
Re: Locomotion attempt
Posted: Thu Jan 31, 2013 1:33 am
by MSat
I wanted to clarify what I had in mind in case there was any confusion. As you can see, it eliminates the problem brantlew mentioned with support structures getting in the way of the user's hands. Ignore my horrible Sketchup "skills", but it should get the point across

Re: Locomotion attempt
Posted: Thu Jan 31, 2013 1:48 am
by STRZ
If it works, and you're able too fool your brain this way, it's a brilliant idea MSat!
Re: Locomotion attempt
Posted: Thu Jan 31, 2013 2:28 am
by MSat
STRZ wrote:If it works, and you're able too fool your brain this way, it's a brilliant idea MSat!
While it's certainly not a perfect solution (if there even is one) there is at least some benefit due to its simplicity and ability to incorporate a folding mechanism for storage. And while I obviously haven't tried it, I think the sensation you would experience would be similar to that of wearing a backpack (minus the weight). One thing that's worth considering would be to let the harness platform have some vertical play - perhaps spring loaded - to allow the body to move up and down a little bit as it does when you normally walk. This doesn't address jumping or crouching, as letting the platform go too low could possible cause injury if you slip on the surface. Perhaps that really wouldn't be a problem in practice, would have to try it to know for sure.
Or perhaps the whole concept is bunk, but I think it's at least worth trying.
Re: Locomotion attempt
Posted: Thu Jan 31, 2013 2:45 am
by STRZ
With a angle mechanism wich only works upwards in place where the two profiles join, similar to a hinge, jumping could be possible. It really all depends if turning can be emulated.
Re: Locomotion attempt
Posted: Thu Jan 31, 2013 6:06 am
by MSat
It dawned on my that my proposed design wouldn't allow the user to lean forwards or side-to-side, which might kinda suck. Instead, a waist+thigh harness could possibly be used, but likely at the expense of some comfort. The basic design should still work though.
Re: Locomotion attempt
Posted: Thu Jan 31, 2013 8:16 am
by JanVR
MSat, nice sketch, and I like how it is simple yet functional. My only question would be how to turn 180 degrees? (for exmple, you want to "turn around" in the game)
To Brantlew's point regarding having something in the way of your swinging arms: I think it might be a non-issue, since I noticed on my device that no one would ever walk on it with his arms swinging next to him. In most cases, the user will carry a game controller or gun with both hands. If not, the user will just have his hands on the ring for extra comfort / stability (this does not feel unnatural, the brain does not really think about where your hands are, nor are you aware of where your hands are).
Re: Locomotion attempt
Posted: Thu Jan 31, 2013 9:08 am
by MSat
JanVR wrote:MSat, nice sketch, and I like how it is simple yet functional. My only question would be how to turn 180 degrees? (for exmple, you want to "turn around" in the game)
What I was thinking is that it wasn't necessary to actually turn your body in real life in order to turn in the virtual world. The system (using sensors in the floor pad, or optical systems like Kinect, Leap Motion, etc.) would detect the turning motions between your feet and the floor. So while your body is executing the motions as it naturally does, the energy is absorbed in the foot/floor interface. It's taking the same concept as you use for walking, but also apply it to turning. Since you have the platform, you can try it out and see how it feels - set up a harness so that your body can't actually turn, and try the movements with your eyes closed. Like I said before, I'm not sure if it would actually work, but it's at least worth a try.
Re: Locomotion attempt
Posted: Thu Jan 31, 2013 10:00 am
by zerax
Re: Locomotion attempt
Posted: Thu Jan 31, 2013 10:18 am
by virror
Been thinking about powered shoes as well, its a very compact solution, easy to just put away and don't use a lot of space. But it might be a bit hard to get it to start and stop at the right time, also it would be nice if it was possible to mount the motors directly on the shoes somehow instead.
The "turning tables" idea is nice, but it will just take up to much space in my opinion, been thinking about that one as well. Also the gaps will cause a big security issue.
Re: Locomotion attempt
Posted: Thu Jan 31, 2013 10:31 am
by zerax
virror wrote:Been thinking about powered shoes as well, its a very compact solution, easy to just put away and don't use a lot of space. But it might be a bit hard to get it to start and stop at the right time, also it would be nice if it was possible to mount the motors directly on the shoes somehow instead.
The "turning tables" idea is nice, but it will just take up to much space in my opinion, been thinking about that one as well. Also the gaps will cause a big security issue.
Powered shoes with feedback respectively through haptic actuators would be nice
Haptic Shoe
http://youtu.be/S3P2lKVDMXk
Re: Locomotion attempt
Posted: Thu Jan 31, 2013 10:43 am
by brantlew
One problem with any active devices is that it is really hard to remove all of the latency out of the system - especially when dealing with motion prediction of a self motivated person instead of a natural system. Even those hundred thousand dollar treadmill devices have enough latency in them that they require practice and/or a safety harness to maintain balance. The strength of both the WizDish and this device is that they are passive and so side-step this complexity and latency issue.
Re: Locomotion attempt
Posted: Thu Jan 31, 2013 11:35 am
by EdZ
If an gantry support is available (i.e. the system does not need to be portable, so you can install some semi-permanent structure), you can either suspend the user in a standard full-body climbing harness (restricts and torso bending motion, but keeps the user upright) or a have rigid 'hook' that extends from above the user's head at the end of the rope/cable/telescopic rod to the back of the user's waist, to connect to a rigid belt. This allows a greater range of motion, but with little stabilisation when leaning. Both provide minimal restriction of limb movement.
Re: Locomotion attempt
Posted: Thu Jan 31, 2013 11:43 am
by brantlew
I think the less "suspension" the better. Feeling your own weight and how it affects the way you shift as you place your feet seems like a big part of the immersion. On the flip-side, dangling your weight and essentially swinging your legs through the air seems like it would feel unnatural, gesture-like, and non-immersive in my opinion.
Re: Locomotion attempt
Posted: Thu Jan 31, 2013 11:52 am
by PasticheDonkey
anyone seen the pacific rim trailer? that's the locomotion system i'd want if at all.
Re: Locomotion attempt
Posted: Thu Jan 31, 2013 12:15 pm
by JanVR
I agree with Brantlew. Any locomotion device that wants to be commercially viable (i.e., affordable to household consumers) will need to be passive and have no moving / rotating parts. Any powered device with motors, sensors, ball bearings, etc., is likely going to end up too expensive to make. Also, the latency associated with powered devices, and the counter-forces exerted on the user, will make the user stumble (as can be seen on the Cyberwalk demos).
For the safety harness, I believe that the less suspension, the better. You need to have your feet and weight on the ground for a natural walking movement. A full user suspension assembly would also make the device rather large (and again, costly).