Re: Help needed: Arduino > FreePIE (can't read serial)
Posted: Fri Nov 21, 2014 3:26 am
The Number One Resource For Stereoscopic 3D Excitement!
https://www.mtbs3d.com/phpbb/
Code: Select all
/*
FreeIMU.h - A libre and easy to use orientation sensing library for Arduino
Copyright (C) 2011 Fabio Varesano <fabio at varesano dot net>
Development of this code has been supported by the Department of Computer Science,
Universita' degli Studi di Torino, Italy within the Piemonte Project
http://www.piemonte.di.unito.it/
This program is free software: you can redistribute it and/or modify
it under the terms of the version 3 GNU General Public License as
published by the Free Software Foundation.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License
along with this program. If not, see <http://www.gnu.org/licenses/>.
*/
#ifndef FreeIMU_h
#define FreeIMU_h
// Uncomment the appropriated version of FreeIMU you are using
//#define FREEIMU_v01
//#define FREEIMU_v02
#define FREEIMU_v03
//#define FREEIMU_v035
//#define FREEIMU_v035_MS
//#define FREEIMU_v035_BMP
//#define FREEIMU_v04
// 3rd party boards. Please consider donating or buying a FreeIMU board to support this library development.
//#define SEN_10121 //IMU Digital Combo Board - 6 Degrees of Freedom ITG3200/ADXL345 SEN-10121 http://www.sparkfun.com/products/10121
//#define SEN_10736 //9 Degrees of Freedom - Razor IMU SEN-10736 http://www.sparkfun.com/products/10736
//#define SEN_10724 //9 Degrees of Freedom - Sensor Stick SEN-10724 http://www.sparkfun.com/products/10724
//#define SEN_10183 //9 Degrees of Freedom - Sensor Stick SEN-10183 http://www.sparkfun.com/products/10183
//#define ARDUIMU_v3 // DIYDrones ArduIMU+ V3 http://store.diydrones.com/ArduIMU_V3_p/kt-arduimu-30.htm or https://www.sparkfun.com/products/11055
//#define GEN_MPU6050 // Generic MPU6050 breakout board. Compatible with GY-521, SEN-11028 and other MPU6050 wich have the MPU6050 AD0 pin connected to GND.
//#define DISABLE_MAGN // Uncomment this line to disable the magnetometer in the sensor fusion algorithm
// *** No configuration needed below this line ***
#define FREEIMU_LIB_VERSION "DEV"
#define FREEIMU_DEVELOPER "Fabio Varesano - varesano.net"
#if F_CPU == 16000000L
#define FREEIMU_FREQ "16 MHz"
#elif F_CPU == 8000000L
#define FREEIMU_FREQ "8 MHz"
#endif
// board IDs
#if defined(FREEIMU_v01)
#define FREEIMU_ID "FreeIMU v0.1"
#elif defined(FREEIMU_v02)
#define FREEIMU_ID "FreeIMU v0.2"
#elif defined(FREEIMU_v03)
#define FREEIMU_ID "FreeIMU v0.3"
#elif defined(FREEIMU_v035)
#define FREEIMU_ID "FreeIMU v0.3.5"
#elif defined(FREEIMU_v035_BMP)
#define FREEIMU_ID "FreeIMU v0.3.5_BMP"
#elif defined(FREEIMU_v035_MS)
#define FREEIMU_ID "FreeIMU v0.3.5_MS"
#elif defined(FREEIMU_v04)
#define FREEIMU_ID "FreeIMU v0.4"
#elif defined(SEN_10121)
#define FREEIMU_ID "SparkFun 10121"
#elif defined(SEN_10736)
#define FREEIMU_ID "SparkFun 10736"
#elif defined(SEN_10724)
#define FREEIMU_ID "SparkFun 10724"
#elif defined(SEN_10183)
#define FREEIMU_ID "SparkFun 10183"
#elif defined(ARDUIMU_v3)
#define FREEIMU_ID "DIY Drones ArduIMU+ V3"
#endif
#define HAS_ITG3200() (defined(FREEIMU_v01) || defined(FREEIMU_v02) || defined(FREEIMU_v03) || defined(FREEIMU_v035) || defined(FREEIMU_v035_MS) || defined(FREEIMU_v035_BMP) || defined(SEN_10121) || defined(SEN_10736) || defined(SEN_10724) || defined(SEN_10183))
#define HAS_ADXL345() (defined(FREEIMU_v01) || defined(FREEIMU_v02) || defined(FREEIMU_v03) || defined(SEN_10121) || defined(SEN_10736) || defined(SEN_10724) || defined(SEN_10183))
#define HAS_BMA180() (defined(FREEIMU_v035) || defined(FREEIMU_v035_MS) || defined(FREEIMU_v035_BMP))
#define HAS_MPU6050() (defined(FREEIMU_v04) || defined(GEN_MPU6050))
#define HAS_MS5611() (defined(FREEIMU_v035_MS) || defined(FREEIMU_v04))
#define HAS_HMC5883L() (defined(FREEIMU_v01) || defined(FREEIMU_v02) || defined(FREEIMU_v03) || defined(FREEIMU_v035) || defined(FREEIMU_v035_MS) || defined(FREEIMU_v035_BMP) || defined(FREEIMU_v04) || defined(SEN_10736) || defined(SEN_10724) || defined(SEN_10183) || defined(ARDUIMU_v3))
#define HAS_MPU6000() (defined(ARDUIMU_v3))
#define IS_6DOM() (defined(SEN_10121) || defined(GEN_MPU6050))
#define IS_9DOM() (defined(FREEIMU_v01) || defined(FREEIMU_v02) || defined(FREEIMU_v03) || defined(FREEIMU_v035) || defined(FREEIMU_v035_MS) || defined(FREEIMU_v035_BMP) || defined(FREEIMU_v04) || defined(SEN_10736) || defined(SEN_10724) || defined(SEN_10183) || defined(ARDUIMU_v3))
#define HAS_AXIS_ALIGNED() (defined(FREEIMU_v01) || defined(FREEIMU_v02) || defined(FREEIMU_v03) || defined(FREEIMU_v035) || defined(FREEIMU_v035_MS) || defined(FREEIMU_v035_BMP) || defined(FREEIMU_v04) || defined(SEN_10121) || defined(SEN_10736))
#include <Wire.h>
#include "Arduino.h"
#include "calibration.h"
#ifndef CALIBRATION_H
#include <EEPROM.h>
#endif
#define FREEIMU_EEPROM_BASE 0x0A
#define FREEIMU_EEPROM_SIGNATURE 0x19
//#if FREEIMU_VER <= 3
#if HAS_ADXL345()
#include <ADXL345.h>
// default I2C 7-bit addresses of the sensors
#define FIMU_ACC_ADDR ADXL345_ADDR_ALT_LOW // SDO connected to GND
//#define FIMU_ADXL345_DEF_ADDR ADXL345_ADDR_ALT_HIGH // SDO connected to GND
#elif HAS_BMA180()
#include <bma180.h>
#define FIMU_ACC_ADDR BMA180_ADDRESS_SDO_LOW
//#define FIMU_ACC_ADDR BMA180_ADDRESS_SDO_HIGH
//#elif FREEIMU_VER == 7
#elif HAS_MPU6050()
#include <Wire.h>
#include "I2Cdev.h"
#include "MPU60X0.h"
#define FIMU_ACCGYRO_ADDR MPU60X0_DEFAULT_ADDRESS
#elif HAS_MPU6000()
#include <SPI.h>
#include "I2Cdev.h"
#include "MPU60X0.h"
#define FIMU_ACCGYRO_ADDR MPU60X0_DEFAULT_SS_PIN
#endif
#if HAS_MS5611()
#include <MS561101BA.h>
#define FIMU_BARO_ADDR MS561101BA_ADDR_CSB_LOW
//#define FIMU_BARO_ADDR MS561101BA_ADDR_CSB_HIGH
#endif
#if HAS_ITG3200()
#include <ITG3200.h>
#endif
#if HAS_HMC5883L()
#include <HMC58X3.h>
#endif
#define FIMU_BMA180_DEF_ADDR BMA180_ADDRESS_SDO_LOW
#define FIMU_ITG3200_DEF_ADDR ITG3200_ADDR_AD0_LOW // AD0 connected to GND
// HMC5843 address is fixed so don't bother to define it
#define twoKpDef (2.0f * 0.5f) // 2 * proportional gain
#define twoKiDef (2.0f * 0.1f) // 2 * integral gain
#ifndef cbi
#define cbi(sfr, bit) (_SFR_BYTE(sfr) &= ~_BV(bit))
#endif
class FreeIMU
{
public:
FreeIMU();
void init();
void init(bool fastmode);
#if HAS_ITG3200()
void init(int acc_addr, int gyro_addr, bool fastmode);
#else
void init(int accgyro_addr, bool fastmode);
#endif
#ifndef CALIBRATION_H
void calLoad();
#endif
void zeroGyro();
void getRawValues(int * raw_values);
void getValues(float * values);
void getQ(float * q);
void getEuler(float * angles);
void getYawPitchRoll(float * ypr);
void getEulerRad(float * angles);
void getYawPitchRollRad(float * ypr);
#if HAS_MS5611()
float getBaroAlt();
float getBaroAlt(float sea_press);
//float getEstimatedAlt();
//float getEstimatedAlt(float sea_press);
#endif
void gravityCompensateAcc(float * acc, float * q);
// we make them public so that users can interact directly with device classes
#if HAS_ADXL345()
ADXL345 acc;
#elif HAS_BMA180()
BMA180 acc;
#endif
#if HAS_HMC5883L()
HMC58X3 magn;
#endif
#if HAS_ITG3200()
ITG3200 gyro;
#elif HAS_MPU6050()
MPU60X0 accgyro;
#elif HAS_MPU6000()
MPU60X0 accgyro;
#endif
#if HAS_MS5611()
MS561101BA baro;
#endif
int* raw_acc, raw_gyro, raw_magn;
// calibration parameters
int16_t gyro_off_x, gyro_off_y, gyro_off_z;
int16_t acc_off_x, acc_off_y, acc_off_z, magn_off_x, magn_off_y, magn_off_z;
float acc_scale_x, acc_scale_y, acc_scale_z, magn_scale_x, magn_scale_y, magn_scale_z;
private:
#if IS_9DOM()
void AHRSupdate(float gx, float gy, float gz, float ax, float ay, float az, float mx, float my, float mz);
#elif IS_6DOM()
void AHRSupdate(float gx, float gy, float gz, float ax, float ay, float az);
#endif
//float q0, q1, q2, q3; // quaternion elements representing the estimated orientation
float iq0, iq1, iq2, iq3;
float exInt, eyInt, ezInt; // scaled integral error
volatile float twoKp; // 2 * proportional gain (Kp)
volatile float twoKi; // 2 * integral gain (Ki)
volatile float q0, q1, q2, q3; // quaternion of sensor frame relative to auxiliary frame
volatile float integralFBx, integralFBy, integralFBz;
unsigned long lastUpdate, now; // sample period expressed in milliseconds
float sampleFreq; // half the sample period expressed in seconds
};
float invSqrt(float number);
void arr3_rad_to_deg(float * arr);
#endif // FreeIMU_h
Code: Select all
1.23,14.39,-3.38
2.93,34.58,-4.57
1.52,17.37,-4.78
4.53,14.39,-3.56
8.83,31.39,-6.83Code: Select all
diagnostics.watch(freeImu.yaw)
diagnostics.watch(freeImu.pitch)
diagnostics.watch(freeImu.roll)Code: Select all
diagnostics.watch(freeImu.yaw)
diagnostics.watch(freeImu.pitch)
diagnostics.watch(freeImu.roll)Code: Select all
1.23,14.39,-3.38
2.93,34.58,-4.57
1.52,17.37,-4.78
4.53,14.39,-3.56
8.83,31.39,-6.83Code: Select all
void loop() {
my3IMU.getYawPitchRoll(ypr);
Serial.print(ypr[0]);
Serial.print(",");
Serial.print(ypr[1]);
Serial.print(",");
Serial.print(ypr[2]);
Serial.println("");
delay(10);
}
Code: Select all
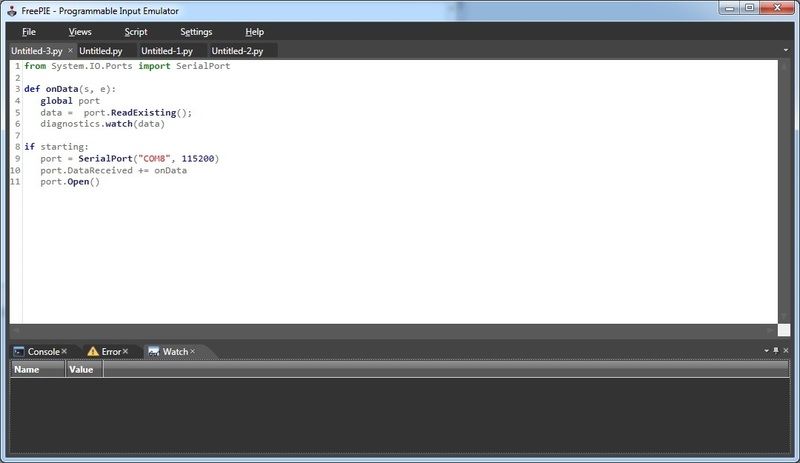
from System.IO.Ports import SerialPort
def onData(s, e):
global port
data = port.ReadExisting();
diagnostics.watch(data)
if starting:
port = SerialPort("COM2", 115200)
port.DataReceived += onData
port.Open()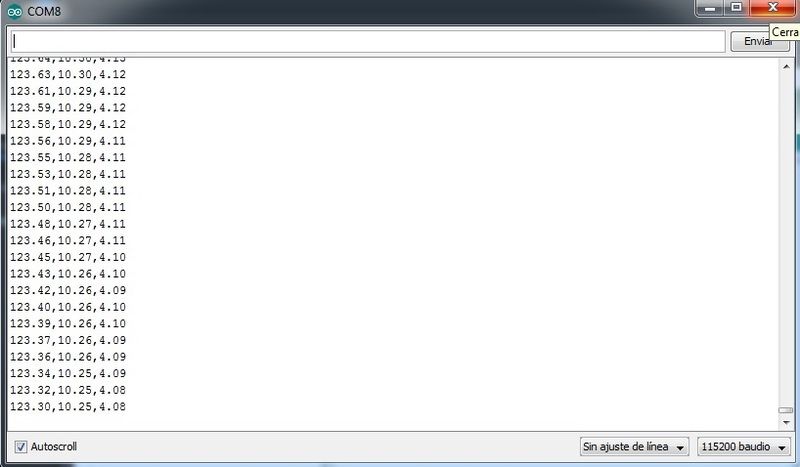
Code: Select all
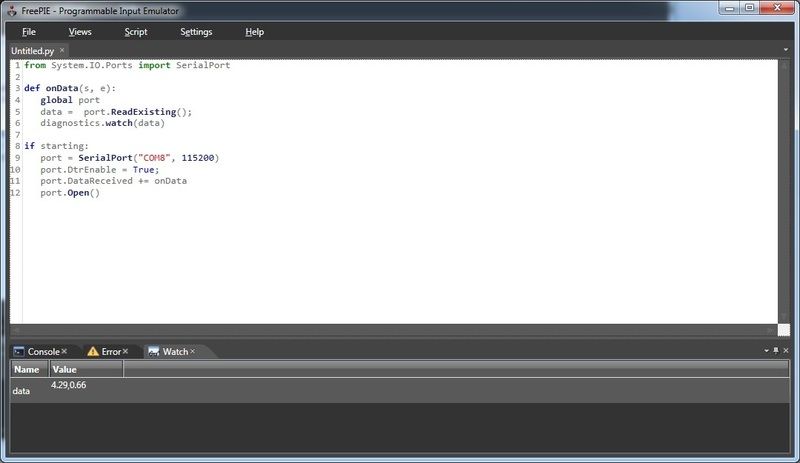
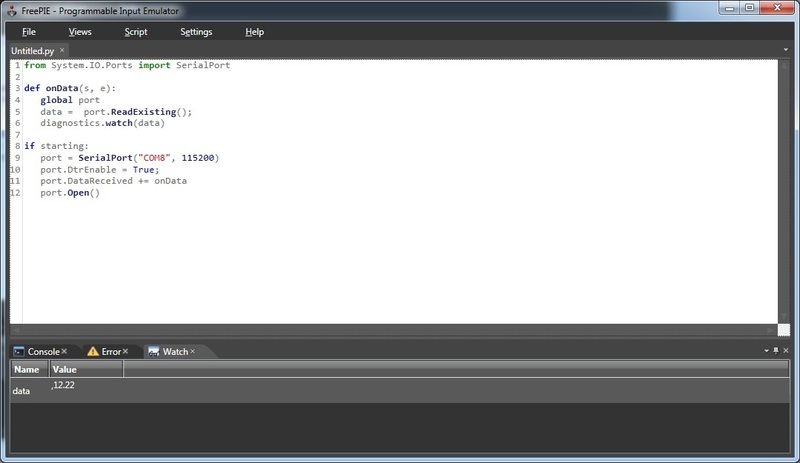
from System.IO.Ports import SerialPort
def onData(s, e):
global port
data = port.ReadExisting();
diagnostics.watch(data)
if starting:
port = SerialPort("COM2", 115200)
port.DtrEnable = true;
port.DataReceived += onData
port.Open()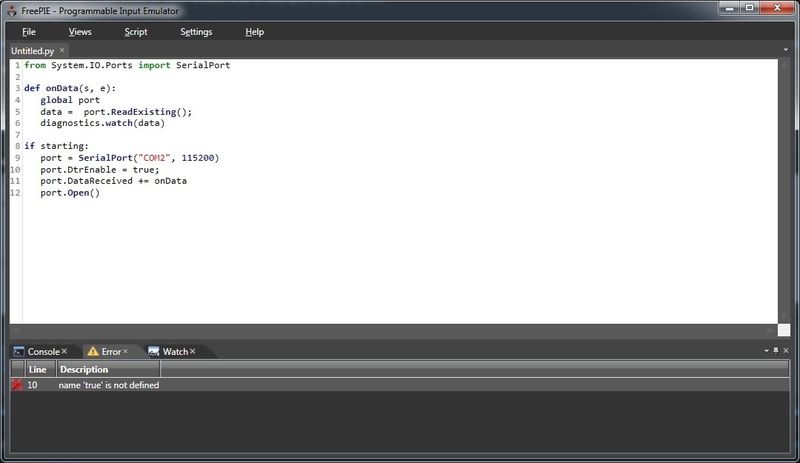
Code: Select all
DEBUG = True
def update():
#Apply deadband filter to avoid drift
#And continousRotation filter to yaw axis to avoid jumps when passing tracker center
x = filters.deadband(filters.delta(math.degrees(filters.continousRotation(freeImu.yaw))), deadband)
y = filters.deadband(filters.delta(math.degrees(freeImu.pitch)), deadband)
mouse.deltaX = x * multiply
mouse.deltaY = y * multiply
if DEBUG:
diagnostics.watch(x)
diagnostics.watch(y)
if starting:
deadband = 0.19
multiply = 1
freeImu.update += update
Code: Select all
### CONFIGURATION ###
# Watch input and output values
DEBUG = True
# Output mode
OUTPUT_FREETRACK = True
OUTPUT_TRACKIR = False
# Keybindings
KEY_CENTER = Key.Pause # Center orientation to current position
KEY_TOGGLE_ON_OFF = Key.End # Toggle headtracking on or off
# Calibration multipliers
TRACKIR_MULTIPLIER = 10
FREETRACK_MULTIPLIER = 0.001
### THE CODE ###
def update():
global yaw
yaw = freeImu.yaw
global pitch
pitch = freeImu.pitch
global roll
roll = freeImu.roll
def updateTrackIR():
trackIR.yaw = (yaw - centerYaw) * TRACKIR_MULTIPLIER
trackIR.pitch = (pitch - centerPitch) * TRACKIR_MULTIPLIER
trackIR.roll = (roll - centerRoll) * TRACKIR_MULTIPLIER
if DEBUG:
diagnostics.watch(trackIR.yaw)
diagnostics.watch(trackIR.pitch)
diagnostics.watch(trackIR.roll)
def updateFreeTrack():
freeTrack.yaw = (yaw - centerYaw) * -FREETRACK_MULTIPLIER # Inverted
freeTrack.pitch = (pitch - centerPitch) * FREETRACK_MULTIPLIER
freeTrack.roll = (roll - centerRoll) * FREETRACK_MULTIPLIER
if DEBUG:
diagnostics.watch(freeTrack.yaw)
diagnostics.watch(freeTrack.pitch)
diagnostics.watch(freeTrack.roll)
def center():
global centerYaw
centerYaw = yaw
global centerPitch
centerPitch = pitch
global centerRoll
centerRoll = roll
if starting:
enabled = True
centerYaw = freeImu.yaw
centerPitch = freeImu.pitch
centerRoll = freeImu.roll
global yaw
yaw = 0.0
global pitch
pitch = 0.0
global roll
roll = 0.0
freeImu.update += update
def do_update():
if OUTPUT_FREETRACK:
updateFreeTrack()
if OUTPUT_TRACKIR:
updateTrackIR()
if DEBUG:
diagnostics.watch(yaw)
diagnostics.watch(pitch)
diagnostics.watch(roll)
if enabled:
do_update()
if keyboard.getKeyDown(KEY_CENTER):
center()
if keyboard.getPressed(KEY_TOGGLE_ON_OFF):
enabled = not enabled
center()
do_update()Code: Select all
OUTPUT_FREETRACK = True
OUTPUT_TRACKIR = FalseCode: Select all
OUTPUT_FREETRACK = False
OUTPUT_TRACKIR = True