I have this board,
https://www.sparkfun.com/products/10736
Help needed: Arduino > FreePIE (can't read serial)
-
CyberVillain
- Petrif-Eyed
- Posts: 2166
- Joined: Mon Jun 22, 2009 8:36 am
- Location: Stockholm, Sweden
-
wilee98
- One Eyed Hopeful
- Posts: 13
- Joined: Sat Jul 19, 2014 2:11 pm
Re: Help needed: Arduino > FreePIE (can't read serial)
That's the razor one we have two different boards mine is a.www.dx.com/p/gy-85-6dof-9dof-imu-sensor ... ino-148436
-
CyberVillain
- Petrif-Eyed
- Posts: 2166
- Joined: Mon Jun 22, 2009 8:36 am
- Location: Stockholm, Sweden
Re: Help needed: Arduino > FreePIE (can't read serial)
Board shouldn't matter since ahrs/freeimu contract is the same but something is obvious not the same.
Do you have possibility to debug FreePIE from visual Studio?
vs 2013 express is free but do you know how to debug?
Do you have possibility to debug FreePIE from visual Studio?
vs 2013 express is free but do you know how to debug?
-
wilee98
- One Eyed Hopeful
- Posts: 13
- Joined: Sat Jul 19, 2014 2:11 pm
Re: Help needed: Arduino > FreePIE (can't read serial)
I do not , no. And I'm only saying about different boards because of the different chips on them, in the freeimu file it has different versions you have to define and undefined in it. ( just a thought).
And I think my problem is my series monitor doesn't do nothing but rotate through the numbers and never settles down, think I need to calibrate it somehow.
And I think my problem is my series monitor doesn't do nothing but rotate through the numbers and never settles down, think I need to calibrate it somehow.
Code: Select all
/*
FreeIMU.h - A libre and easy to use orientation sensing library for Arduino
Copyright (C) 2011 Fabio Varesano <fabio at varesano dot net>
Development of this code has been supported by the Department of Computer Science,
Universita' degli Studi di Torino, Italy within the Piemonte Project
http://www.piemonte.di.unito.it/
This program is free software: you can redistribute it and/or modify
it under the terms of the version 3 GNU General Public License as
published by the Free Software Foundation.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License
along with this program. If not, see <http://www.gnu.org/licenses/>.
*/
#ifndef FreeIMU_h
#define FreeIMU_h
// Uncomment the appropriated version of FreeIMU you are using
//#define FREEIMU_v01
//#define FREEIMU_v02
#define FREEIMU_v03
//#define FREEIMU_v035
//#define FREEIMU_v035_MS
//#define FREEIMU_v035_BMP
//#define FREEIMU_v04
// 3rd party boards. Please consider donating or buying a FreeIMU board to support this library development.
//#define SEN_10121 //IMU Digital Combo Board - 6 Degrees of Freedom ITG3200/ADXL345 SEN-10121 http://www.sparkfun.com/products/10121
//#define SEN_10736 //9 Degrees of Freedom - Razor IMU SEN-10736 http://www.sparkfun.com/products/10736
//#define SEN_10724 //9 Degrees of Freedom - Sensor Stick SEN-10724 http://www.sparkfun.com/products/10724
//#define SEN_10183 //9 Degrees of Freedom - Sensor Stick SEN-10183 http://www.sparkfun.com/products/10183
//#define ARDUIMU_v3 // DIYDrones ArduIMU+ V3 http://store.diydrones.com/ArduIMU_V3_p/kt-arduimu-30.htm or https://www.sparkfun.com/products/11055
//#define GEN_MPU6050 // Generic MPU6050 breakout board. Compatible with GY-521, SEN-11028 and other MPU6050 wich have the MPU6050 AD0 pin connected to GND.
//#define DISABLE_MAGN // Uncomment this line to disable the magnetometer in the sensor fusion algorithm
// *** No configuration needed below this line ***
#define FREEIMU_LIB_VERSION "DEV"
#define FREEIMU_DEVELOPER "Fabio Varesano - varesano.net"
#if F_CPU == 16000000L
#define FREEIMU_FREQ "16 MHz"
#elif F_CPU == 8000000L
#define FREEIMU_FREQ "8 MHz"
#endif
// board IDs
#if defined(FREEIMU_v01)
#define FREEIMU_ID "FreeIMU v0.1"
#elif defined(FREEIMU_v02)
#define FREEIMU_ID "FreeIMU v0.2"
#elif defined(FREEIMU_v03)
#define FREEIMU_ID "FreeIMU v0.3"
#elif defined(FREEIMU_v035)
#define FREEIMU_ID "FreeIMU v0.3.5"
#elif defined(FREEIMU_v035_BMP)
#define FREEIMU_ID "FreeIMU v0.3.5_BMP"
#elif defined(FREEIMU_v035_MS)
#define FREEIMU_ID "FreeIMU v0.3.5_MS"
#elif defined(FREEIMU_v04)
#define FREEIMU_ID "FreeIMU v0.4"
#elif defined(SEN_10121)
#define FREEIMU_ID "SparkFun 10121"
#elif defined(SEN_10736)
#define FREEIMU_ID "SparkFun 10736"
#elif defined(SEN_10724)
#define FREEIMU_ID "SparkFun 10724"
#elif defined(SEN_10183)
#define FREEIMU_ID "SparkFun 10183"
#elif defined(ARDUIMU_v3)
#define FREEIMU_ID "DIY Drones ArduIMU+ V3"
#endif
#define HAS_ITG3200() (defined(FREEIMU_v01) || defined(FREEIMU_v02) || defined(FREEIMU_v03) || defined(FREEIMU_v035) || defined(FREEIMU_v035_MS) || defined(FREEIMU_v035_BMP) || defined(SEN_10121) || defined(SEN_10736) || defined(SEN_10724) || defined(SEN_10183))
#define HAS_ADXL345() (defined(FREEIMU_v01) || defined(FREEIMU_v02) || defined(FREEIMU_v03) || defined(SEN_10121) || defined(SEN_10736) || defined(SEN_10724) || defined(SEN_10183))
#define HAS_BMA180() (defined(FREEIMU_v035) || defined(FREEIMU_v035_MS) || defined(FREEIMU_v035_BMP))
#define HAS_MPU6050() (defined(FREEIMU_v04) || defined(GEN_MPU6050))
#define HAS_MS5611() (defined(FREEIMU_v035_MS) || defined(FREEIMU_v04))
#define HAS_HMC5883L() (defined(FREEIMU_v01) || defined(FREEIMU_v02) || defined(FREEIMU_v03) || defined(FREEIMU_v035) || defined(FREEIMU_v035_MS) || defined(FREEIMU_v035_BMP) || defined(FREEIMU_v04) || defined(SEN_10736) || defined(SEN_10724) || defined(SEN_10183) || defined(ARDUIMU_v3))
#define HAS_MPU6000() (defined(ARDUIMU_v3))
#define IS_6DOM() (defined(SEN_10121) || defined(GEN_MPU6050))
#define IS_9DOM() (defined(FREEIMU_v01) || defined(FREEIMU_v02) || defined(FREEIMU_v03) || defined(FREEIMU_v035) || defined(FREEIMU_v035_MS) || defined(FREEIMU_v035_BMP) || defined(FREEIMU_v04) || defined(SEN_10736) || defined(SEN_10724) || defined(SEN_10183) || defined(ARDUIMU_v3))
#define HAS_AXIS_ALIGNED() (defined(FREEIMU_v01) || defined(FREEIMU_v02) || defined(FREEIMU_v03) || defined(FREEIMU_v035) || defined(FREEIMU_v035_MS) || defined(FREEIMU_v035_BMP) || defined(FREEIMU_v04) || defined(SEN_10121) || defined(SEN_10736))
#include <Wire.h>
#include "Arduino.h"
#include "calibration.h"
#ifndef CALIBRATION_H
#include <EEPROM.h>
#endif
#define FREEIMU_EEPROM_BASE 0x0A
#define FREEIMU_EEPROM_SIGNATURE 0x19
//#if FREEIMU_VER <= 3
#if HAS_ADXL345()
#include <ADXL345.h>
// default I2C 7-bit addresses of the sensors
#define FIMU_ACC_ADDR ADXL345_ADDR_ALT_LOW // SDO connected to GND
//#define FIMU_ADXL345_DEF_ADDR ADXL345_ADDR_ALT_HIGH // SDO connected to GND
#elif HAS_BMA180()
#include <bma180.h>
#define FIMU_ACC_ADDR BMA180_ADDRESS_SDO_LOW
//#define FIMU_ACC_ADDR BMA180_ADDRESS_SDO_HIGH
//#elif FREEIMU_VER == 7
#elif HAS_MPU6050()
#include <Wire.h>
#include "I2Cdev.h"
#include "MPU60X0.h"
#define FIMU_ACCGYRO_ADDR MPU60X0_DEFAULT_ADDRESS
#elif HAS_MPU6000()
#include <SPI.h>
#include "I2Cdev.h"
#include "MPU60X0.h"
#define FIMU_ACCGYRO_ADDR MPU60X0_DEFAULT_SS_PIN
#endif
#if HAS_MS5611()
#include <MS561101BA.h>
#define FIMU_BARO_ADDR MS561101BA_ADDR_CSB_LOW
//#define FIMU_BARO_ADDR MS561101BA_ADDR_CSB_HIGH
#endif
#if HAS_ITG3200()
#include <ITG3200.h>
#endif
#if HAS_HMC5883L()
#include <HMC58X3.h>
#endif
#define FIMU_BMA180_DEF_ADDR BMA180_ADDRESS_SDO_LOW
#define FIMU_ITG3200_DEF_ADDR ITG3200_ADDR_AD0_LOW // AD0 connected to GND
// HMC5843 address is fixed so don't bother to define it
#define twoKpDef (2.0f * 0.5f) // 2 * proportional gain
#define twoKiDef (2.0f * 0.1f) // 2 * integral gain
#ifndef cbi
#define cbi(sfr, bit) (_SFR_BYTE(sfr) &= ~_BV(bit))
#endif
class FreeIMU
{
public:
FreeIMU();
void init();
void init(bool fastmode);
#if HAS_ITG3200()
void init(int acc_addr, int gyro_addr, bool fastmode);
#else
void init(int accgyro_addr, bool fastmode);
#endif
#ifndef CALIBRATION_H
void calLoad();
#endif
void zeroGyro();
void getRawValues(int * raw_values);
void getValues(float * values);
void getQ(float * q);
void getEuler(float * angles);
void getYawPitchRoll(float * ypr);
void getEulerRad(float * angles);
void getYawPitchRollRad(float * ypr);
#if HAS_MS5611()
float getBaroAlt();
float getBaroAlt(float sea_press);
//float getEstimatedAlt();
//float getEstimatedAlt(float sea_press);
#endif
void gravityCompensateAcc(float * acc, float * q);
// we make them public so that users can interact directly with device classes
#if HAS_ADXL345()
ADXL345 acc;
#elif HAS_BMA180()
BMA180 acc;
#endif
#if HAS_HMC5883L()
HMC58X3 magn;
#endif
#if HAS_ITG3200()
ITG3200 gyro;
#elif HAS_MPU6050()
MPU60X0 accgyro;
#elif HAS_MPU6000()
MPU60X0 accgyro;
#endif
#if HAS_MS5611()
MS561101BA baro;
#endif
int* raw_acc, raw_gyro, raw_magn;
// calibration parameters
int16_t gyro_off_x, gyro_off_y, gyro_off_z;
int16_t acc_off_x, acc_off_y, acc_off_z, magn_off_x, magn_off_y, magn_off_z;
float acc_scale_x, acc_scale_y, acc_scale_z, magn_scale_x, magn_scale_y, magn_scale_z;
private:
#if IS_9DOM()
void AHRSupdate(float gx, float gy, float gz, float ax, float ay, float az, float mx, float my, float mz);
#elif IS_6DOM()
void AHRSupdate(float gx, float gy, float gz, float ax, float ay, float az);
#endif
//float q0, q1, q2, q3; // quaternion elements representing the estimated orientation
float iq0, iq1, iq2, iq3;
float exInt, eyInt, ezInt; // scaled integral error
volatile float twoKp; // 2 * proportional gain (Kp)
volatile float twoKi; // 2 * integral gain (Ki)
volatile float q0, q1, q2, q3; // quaternion of sensor frame relative to auxiliary frame
volatile float integralFBx, integralFBy, integralFBz;
unsigned long lastUpdate, now; // sample period expressed in milliseconds
float sampleFreq; // half the sample period expressed in seconds
};
float invSqrt(float number);
void arr3_rad_to_deg(float * arr);
#endif // FreeIMU_h
-
CyberVillain
- Petrif-Eyed
- Posts: 2166
- Joined: Mon Jun 22, 2009 8:36 am
- Location: Stockholm, Sweden
Re: Help needed: Arduino > FreePIE (can't read serial)
Those are different problems FreePIE cant even start communcating with you, otherwise those numbers should show up in FreePIE
-
Nakon
- One Eyed Hopeful
- Posts: 38
- Joined: Thu Sep 04, 2014 6:40 am
Re: Help needed: Arduino > FreePIE (can't read serial)
Hello... again! 
I'm back retaking this little project.
And I'm still getting the same result: nothing.

I checked again Baud rate (115000) and COM port (12).
At arduino serial monitor i can see values like this (changing really fast):
Then, i close that serial monitor (even arduino IDE), open freepie, start a new script and write these very simple lines:
When i run it, i can see, at watch window, values of variables freeImu.yaw, freeImu.pitch and freeImu.roll changing... but only once! 
I mean, for example, freeImu.yaw change from "0" to "2", freeImu.pitch from "0" to "25" and freeImu.roll from "0" to "-3"
Once.
And then... nothing.
It seems that freepie is able only to read one line from serial port (i think).
So i'm considering two different causes:
1-
I'm a complete noob with freepie... and my mistake is my script is not in a loop. So it runs only once.
As i said, at the momment my freepie script is only:
Nothing more!
No "update()" no "if starting" ...
If this is the problem (my script is not in a loop running over and over again), in that case, the result i'm getting is completely normal (freepie read values from serial port once, so i get values at watch window once)
2-
If the read is in a loop and freepie can read a line but not the next one...
is it possible that can be something wrong at the end of the line? I mean, freepie expects "something" that i'm not considering?
As i wrote above, i can see at arduino serial monitor values like these:
I see three comma separated values and then "jump" to the next line.
Can be possible i'm missing something? and "space" at the end of the line or another "comma",...
Or just the opposite: and "space" that should not be there.
Or the time at the end of the loop ("delay(10)") is insufficient.
I mean, something "i can't see" only viewing these values at the arduino serial monitor.
Something that makes that freepie can´t reach the next line.
My Arduino sketch ends with:
Again... help needed!
I'm back retaking this little project.
And I'm still getting the same result: nothing.
I checked again Baud rate (115000) and COM port (12).
At arduino serial monitor i can see values like this (changing really fast):
Code: Select all
1.23,14.39,-3.38
2.93,34.58,-4.57
1.52,17.37,-4.78
4.53,14.39,-3.56
8.83,31.39,-6.83Code: Select all
diagnostics.watch(freeImu.yaw)
diagnostics.watch(freeImu.pitch)
diagnostics.watch(freeImu.roll)I mean, for example, freeImu.yaw change from "0" to "2", freeImu.pitch from "0" to "25" and freeImu.roll from "0" to "-3"
Once.
And then... nothing.
It seems that freepie is able only to read one line from serial port (i think).
So i'm considering two different causes:
1-
I'm a complete noob with freepie...
As i said, at the momment my freepie script is only:
Code: Select all
diagnostics.watch(freeImu.yaw)
diagnostics.watch(freeImu.pitch)
diagnostics.watch(freeImu.roll)No "update()" no "if starting" ...
If this is the problem (my script is not in a loop running over and over again), in that case, the result i'm getting is completely normal (freepie read values from serial port once, so i get values at watch window once)
2-
If the read is in a loop and freepie can read a line but not the next one...
is it possible that can be something wrong at the end of the line? I mean, freepie expects "something" that i'm not considering?
As i wrote above, i can see at arduino serial monitor values like these:
Code: Select all
1.23,14.39,-3.38
2.93,34.58,-4.57
1.52,17.37,-4.78
4.53,14.39,-3.56
8.83,31.39,-6.83Can be possible i'm missing something? and "space" at the end of the line or another "comma",...
Or just the opposite: and "space" that should not be there.
Or the time at the end of the loop ("delay(10)") is insufficient.
I mean, something "i can't see" only viewing these values at the arduino serial monitor.
Something that makes that freepie can´t reach the next line.
My Arduino sketch ends with:
Code: Select all
void loop() {
my3IMU.getYawPitchRoll(ypr);
Serial.print(ypr[0]);
Serial.print(",");
Serial.print(ypr[1]);
Serial.print(",");
Serial.print(ypr[2]);
Serial.println("");
delay(10);
}
Again... help needed!
-
CyberVillain
- Petrif-Eyed
- Posts: 2166
- Joined: Mon Jun 22, 2009 8:36 am
- Location: Stockholm, Sweden
Re: Help needed: Arduino > FreePIE (can't read serial)
FreePIE is doing a loop for you so no need, this is really strange
For fun, try this code
Change comport and baudrate to correct
For fun, try this code
Code: Select all
from System.IO.Ports import SerialPort
def onData(s, e):
global port
data = port.ReadExisting();
diagnostics.watch(data)
if starting:
port = SerialPort("COM2", 115200)
port.DataReceived += onData
port.Open()-
Nakon
- One Eyed Hopeful
- Posts: 38
- Joined: Thu Sep 04, 2014 6:40 am
Re: Help needed: Arduino > FreePIE (can't read serial)
Itried your script and nothing seems to happen.
Arduino serial monitor:
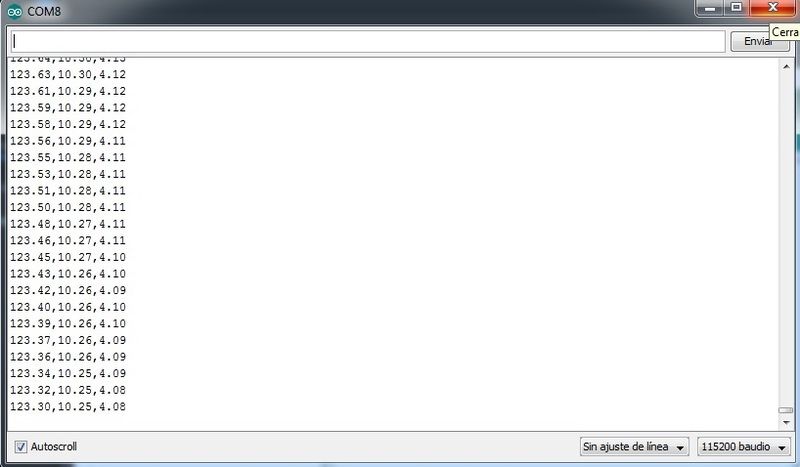
Then, close serial monitor, open freepie, new file, paste your script, change comport and... nothing happens at watch window:
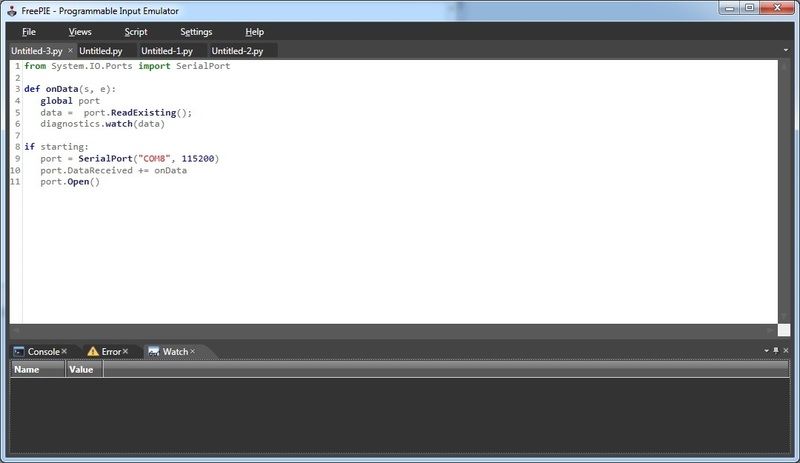
I suppose that this script simply shows at watch window what is reading at comport, isn't it?
Arduino serial monitor:
Then, close serial monitor, open freepie, new file, paste your script, change comport and... nothing happens at watch window:
I suppose that this script simply shows at watch window what is reading at comport, isn't it?
-
CyberVillain
- Petrif-Eyed
- Posts: 2166
- Joined: Mon Jun 22, 2009 8:36 am
- Location: Stockholm, Sweden
Re: Help needed: Arduino > FreePIE (can't read serial)
Yepp, and you do not keep the Serial montior active, because it will steal the port
Try
adding
port.DtrEnable = true;
Try
adding
port.DtrEnable = true;
Code: Select all
from System.IO.Ports import SerialPort
def onData(s, e):
global port
data = port.ReadExisting();
diagnostics.watch(data)
if starting:
port = SerialPort("COM2", 115200)
port.DtrEnable = true;
port.DataReceived += onData
port.Open()-
Nakon
- One Eyed Hopeful
- Posts: 38
- Joined: Thu Sep 04, 2014 6:40 am
Re: Help needed: Arduino > FreePIE (can't read serial)
I get a compilation error:
"name 'true' is not defined"
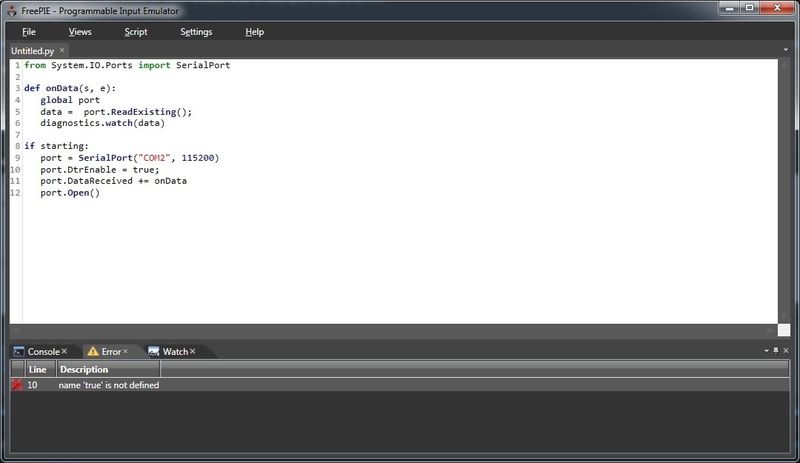
"name 'true' is not defined"
-
CyberVillain
- Petrif-Eyed
- Posts: 2166
- Joined: Mon Jun 22, 2009 8:36 am
- Location: Stockholm, Sweden
Re: Help needed: Arduino > FreePIE (can't read serial)
Sorry, thats the .net naming style, in python its True
-
Nakon
- One Eyed Hopeful
- Posts: 38
- Joined: Thu Sep 04, 2014 6:40 am
Re: Help needed: Arduino > FreePIE (can't read serial)
Tnak you!
I'll try and post the results.
I'll try and post the results.
-
Nakon
- One Eyed Hopeful
- Posts: 38
- Joined: Thu Sep 04, 2014 6:40 am
Re: Help needed: Arduino > FreePIE (can't read serial)
CyberVillain, to run that script do I need to copy pySerial to the FreePIE\pylib folder?
Like this:
http://www.mtbs3d.com/phpBB/viewtopic.php?f=139&t=21114
Like this:
http://www.mtbs3d.com/phpBB/viewtopic.php?f=139&t=21114
-
CyberVillain
- Petrif-Eyed
- Posts: 2166
- Joined: Mon Jun 22, 2009 8:36 am
- Location: Stockholm, Sweden
-
Nakon
- One Eyed Hopeful
- Posts: 38
- Joined: Thu Sep 04, 2014 6:40 am
Re: Help needed: Arduino > FreePIE (can't read serial)
It's alive! (almost  )
)
I tried that script with "True" and at last I get values at watch window
That values appear really fast so i can´t read them
If I take a snapshot i get pics like this:
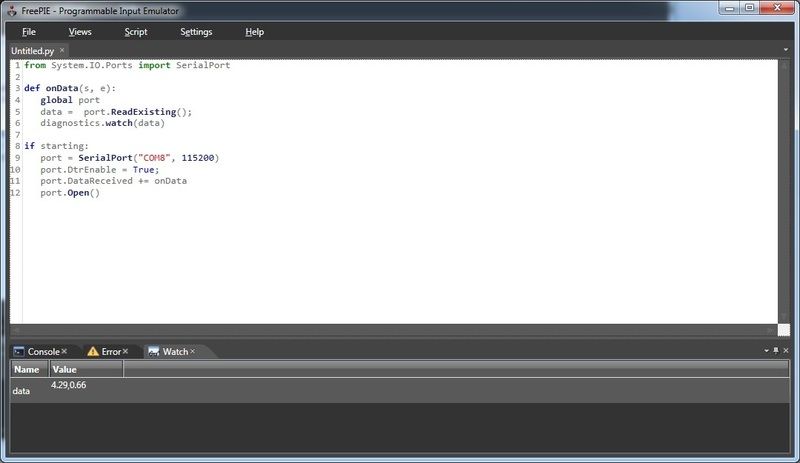
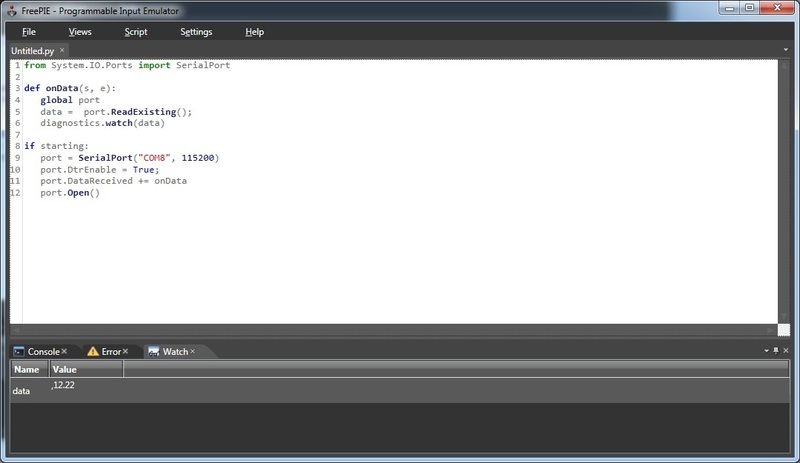
It seems that that values are not in the way freepie expects to make freeIMU plugin work, are they?
I tried that script with "True" and at last I get values at watch window
That values appear really fast so i can´t read them
If I take a snapshot i get pics like this:
It seems that that values are not in the way freepie expects to make freeIMU plugin work, are they?
-
CyberVillain
- Petrif-Eyed
- Posts: 2166
- Joined: Mon Jun 22, 2009 8:36 am
- Location: Stockholm, Sweden
Re: Help needed: Arduino > FreePIE (can't read serial)
Try this version of FreePIE it has a fix that I forgot about (Should release new version probably )
edit: With try I mean your orignal script btw
edit: With try I mean your orignal script btw
You do not have the required permissions to view the files attached to this post.
-
Nakon
- One Eyed Hopeful
- Posts: 38
- Joined: Thu Sep 04, 2014 6:40 am
Re: Help needed: Arduino > FreePIE (can't read serial)
Eureka!!!!!!!!!!!!!!!
It seems to work!!!!!!!!
Thank you very much!!!
Finally i can see values changing at watch window!
But only freetrack ones.
Trackir yaw pitch and roll don't move at all (always "0").
And I tried to use this little head-tracker (using freetack values) in a pair of games (Falcon BMS and IL-2) and nothing happens.
It seems to work!!!!!!!!
Thank you very much!!!
Finally i can see values changing at watch window!
But only freetrack ones.
Trackir yaw pitch and roll don't move at all (always "0").
And I tried to use this little head-tracker (using freetack values) in a pair of games (Falcon BMS and IL-2) and nothing happens.
-
Nakon
- One Eyed Hopeful
- Posts: 38
- Joined: Thu Sep 04, 2014 6:40 am
Re: Help needed: Arduino > FreePIE (can't read serial)
Using it like a mouse works great!!!!!
Code: Select all
DEBUG = True
def update():
#Apply deadband filter to avoid drift
#And continousRotation filter to yaw axis to avoid jumps when passing tracker center
x = filters.deadband(filters.delta(math.degrees(filters.continousRotation(freeImu.yaw))), deadband)
y = filters.deadband(filters.delta(math.degrees(freeImu.pitch)), deadband)
mouse.deltaX = x * multiply
mouse.deltaY = y * multiply
if DEBUG:
diagnostics.watch(x)
diagnostics.watch(y)
if starting:
deadband = 0.19
multiply = 1
freeImu.update += update
-
CyberVillain
- Petrif-Eyed
- Posts: 2166
- Joined: Mon Jun 22, 2009 8:36 am
- Location: Stockholm, Sweden
Re: Help needed: Arduino > FreePIE (can't read serial)
Can I see the Freetrack script please
-
Nakon
- One Eyed Hopeful
- Posts: 38
- Joined: Thu Sep 04, 2014 6:40 am
Re: Help needed: Arduino > FreePIE (can't read serial)
Sure!
The script is:
With this script i can see freetrack values changing fast when i move the arduino board (with a mpu6050 sensor) but doesn' seem to do nothing in a few games i tried.
If i change
with
the values of trackir don't move at all (always "0"). And script crashes after 30 seconds (more or less).
The script is:
Code: Select all
### CONFIGURATION ###
# Watch input and output values
DEBUG = True
# Output mode
OUTPUT_FREETRACK = True
OUTPUT_TRACKIR = False
# Keybindings
KEY_CENTER = Key.Pause # Center orientation to current position
KEY_TOGGLE_ON_OFF = Key.End # Toggle headtracking on or off
# Calibration multipliers
TRACKIR_MULTIPLIER = 10
FREETRACK_MULTIPLIER = 0.001
### THE CODE ###
def update():
global yaw
yaw = freeImu.yaw
global pitch
pitch = freeImu.pitch
global roll
roll = freeImu.roll
def updateTrackIR():
trackIR.yaw = (yaw - centerYaw) * TRACKIR_MULTIPLIER
trackIR.pitch = (pitch - centerPitch) * TRACKIR_MULTIPLIER
trackIR.roll = (roll - centerRoll) * TRACKIR_MULTIPLIER
if DEBUG:
diagnostics.watch(trackIR.yaw)
diagnostics.watch(trackIR.pitch)
diagnostics.watch(trackIR.roll)
def updateFreeTrack():
freeTrack.yaw = (yaw - centerYaw) * -FREETRACK_MULTIPLIER # Inverted
freeTrack.pitch = (pitch - centerPitch) * FREETRACK_MULTIPLIER
freeTrack.roll = (roll - centerRoll) * FREETRACK_MULTIPLIER
if DEBUG:
diagnostics.watch(freeTrack.yaw)
diagnostics.watch(freeTrack.pitch)
diagnostics.watch(freeTrack.roll)
def center():
global centerYaw
centerYaw = yaw
global centerPitch
centerPitch = pitch
global centerRoll
centerRoll = roll
if starting:
enabled = True
centerYaw = freeImu.yaw
centerPitch = freeImu.pitch
centerRoll = freeImu.roll
global yaw
yaw = 0.0
global pitch
pitch = 0.0
global roll
roll = 0.0
freeImu.update += update
def do_update():
if OUTPUT_FREETRACK:
updateFreeTrack()
if OUTPUT_TRACKIR:
updateTrackIR()
if DEBUG:
diagnostics.watch(yaw)
diagnostics.watch(pitch)
diagnostics.watch(roll)
if enabled:
do_update()
if keyboard.getKeyDown(KEY_CENTER):
center()
if keyboard.getPressed(KEY_TOGGLE_ON_OFF):
enabled = not enabled
center()
do_update()If i change
Code: Select all
OUTPUT_FREETRACK = True
OUTPUT_TRACKIR = FalseCode: Select all
OUTPUT_FREETRACK = False
OUTPUT_TRACKIR = True-
CyberVillain
- Petrif-Eyed
- Posts: 2166
- Joined: Mon Jun 22, 2009 8:36 am
- Location: Stockholm, Sweden
Re: Help needed: Arduino > FreePIE (can't read serial)
I dont think tha trackir support reading the properties when writing, so remove watch lines and it could work. Sadly there are a lot of titles that do not work out of the box you need
http://naturalpointofview.blogspot.se/p ... fixer.html
http://naturalpointofview.blogspot.se/p ... fixer.html
-
Nakon
- One Eyed Hopeful
- Posts: 38
- Joined: Thu Sep 04, 2014 6:40 am
Re: Help needed: Arduino > FreePIE (can't read serial)
I've been playing Falcon BMS and IL-2 with freetrack and FaceTrackNoIR for years
Anyway i'll keep trying
Anyway i'll keep trying
-
CyberVillain
- Petrif-Eyed
- Posts: 2166
- Joined: Mon Jun 22, 2009 8:36 am
- Location: Stockholm, Sweden
Re: Help needed: Arduino > FreePIE (can't read serial)
Ah, all Freetrack titles should work