GlovePie script with working proof of concept code for trackir 6DOF emulation will be posted soon.
// ***START OF GLOVEPIE PROGRAM***
// Proof of Concept - Prototype Wii Remote 6 Degree of Freedom All Optical Tracking
// Requires Two Wii Remotes each with a Wii HammerHead sensorbar attachment
// Programmed using GLOVEPIE v0.30
// Fake TrackIR tested on Battle of Britain 2 - Wings of Victory - with patch v2.08 - Full 6 DOF cockpit model
// Concept and hardware by M.A.V. Brisbane Australia
// Public Release v1, 14 September 2009
// Thanks to all third parties including Carl Kenner (GlovePie), Natural Point Inc (TrackIR), Nintendo (Wii Remote), Shockwave (BOB2).
// Thanks to "Meant to be Seen" MTBS for originally hosting this post at MTBS Forums
//
http://www.mtbs3d.com/phpBB/viewtopic.php?f=6&t=4251" onclick="window.open(this.href);return false;
pie.framerate = 100Hz
var.screenwidth = screen.Width
var.screenheight = screen.Height
// Wii camera centre pixel coordinates
var.wiicameraxcentre = 512
var.wiicameraycentre = 384
// Wii camera nominal half field of view x & y axis
var.wiicameraxhalfFOV = 20
var.wiicamerayhalfFOV = 15
// Wii camera nominal angular resolution
var.wiicamangletopixel = 20/512
// Wii Hammerhead sensor bar LED separation in centimetres for both Wii remotes
var.S_ledbaseline = 6
//CONNECTION ORDER for TWO Wii Remote controllers
// First wiimote connected is mobile wiimote1 followed by stationary wiimote2
debug = ' working '
// Check for and read in all IR point coordinates at once
if wiimote1.dot1vis AND wiimote1.dot2vis AND wiimote2.dot1vis AND wiimote2.dot2vis
var.w1dx1 = wiimote1.dot1x
var.w1dy1 = wiimote1.dot1y
var.w1dx2 = wiimote1.dot2x
var.w1dy2 = wiimote1.dot2y
var.w2dx1 = wiimote2.dot1x
var.w2dy1 = wiimote2.dot1y
var.w2dx2 = wiimote2.dot2x
var.w2dy2 = wiimote2.dot2y
// debug = 'W1 LED 1 ( ' + var.w1dx1 + ' ,' + var.w1dy1 + ' ) ' + ' W1 LED 2 ( ' + var.w1dx2 + ' ,' + var.w1dy2 + ' ) ' + ' W2 LED 1 ( ' + var.w2dx1 + ' ,' + var.w2dy1 + ' ) ' + ' W2 LED 2 ( ' + var.w2dx2 + ' ,' + var.w2dy2 + ' ) '
// CODE FOR MOBILE WIIMOTE - W1
// Mobile Wii Remote wiimote1 looking at sensorbar2 on stationary wiimote2
// Mobile wiimote IR pixel coordinates looking at stationary sensorbar w2 leds (0,0) bottom left corner
// w2 IR camera centre position located at middle of w2 sensorbar leds
var.M_saveragex = (var.w1dx1 + var.w1dx2)/2
var.M_saveragey = (var.w1dy1 + var.w1dy2)/2
// for rotation calculations
//ordinary coordinates for w1 transformations (-512, -384) bottom left corner
var.M_sanglex = ( var.M_saveragex/512 - 1 ) * var.wiicameraxhalfFOV // x positive to right of vertical
var.M_sangley = ( var.M_saveragey/384 - 1 ) * var.wiicamerayhalfFOV // y positive up from horizontal
// Twist gradient for artificial horizon as seen by mobile w1 camera (0,0) bottom left corner
var.twistgrad = ( var.w1dy2 - var.w1dy1)/( var.w1dx2 - var.w1dx1 )
// NOTE: roll angle between +90 to -90 with atan function
// The actual roll angle for the mobile w1 remote is opposite to the perceived artificial horizon roll angle
var.M_roll = 0 - atan( var.twistgrad )
// for translation calculations
// stationary sensorbar2 led pixel separation distance as seen by mobile remote w1
var.M_Sledbaselinepixeldist = sqrt( ( var.w1dx1 - var.w1dx2)^2 + (var.w1dy1 - var.w1dy2)^2 )
// End mobile w1 code
// CODE FOR STATIONARY WII REMOTE - W2
// Stationary Wii Remote wiimote2 looking at sensorbar1 on mobile wiimote1 (0,0) bottom left corner
var.S_maveragex = (var.w2dx1 + var.w2dx2)/2
var.S_maveragey = (var.w2dy1 + var.w2dy2)/2
// for rotation calculations
// absolute x,y angle coordinates of mobile w1 camera centre as seen from stationary w2 (-512, -384) bottom left corner
var.S_manglex = ( var.S_maveragex/512 - 1 ) * var.wiicameraxhalfFOV
var.S_mangley = ( var.S_maveragey/384 - 1 ) * var.wiicamerayhalfFOV
// for translation calculations
// for w2 stationary camera centre axis to w1 mobile camera centre included angle as seen from stationary w2
var.S_angleYP = sqrt(var.S_manglex^2 + var.S_mangley^2)
// End stationary w2 code
//********************************************************************************************************************
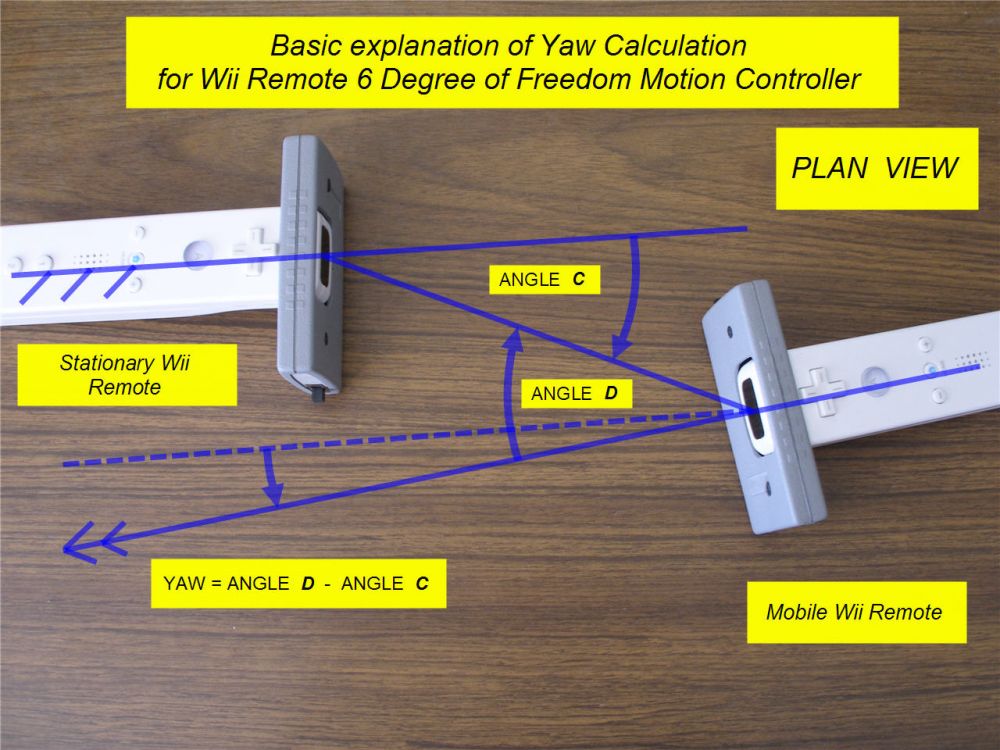
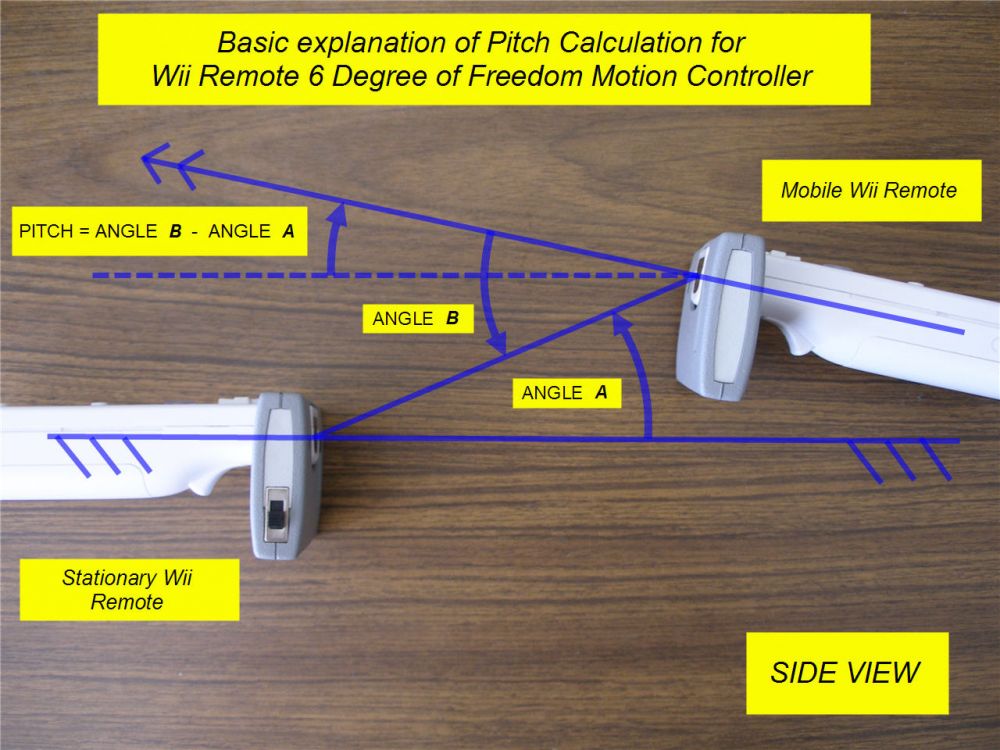
// STATIONARY WII REMOTE w2 - YAW AND PITCH COMPONENT CALCULATIONS - WITHOUT ANY OFFSETS AND WITH SENSE CORRECTION
var.S_yaw = 0 - var.S_manglex
var.S_pitch = var.S_mangley
var.S_roll = 0
//********************************************************************************************************************
// MOBILE WII REMOTE w1 - YAW AND PITCH COMPONENT CALCULATIONS WITH ROLL RECTIFICATION
// METHOD: Rotate the angle coordinate vector about the origin so the s2 artificial horizon is effectively level
// Roll rectification rotation of coordinates is in the same sense as the actual mobile camera roll rotation
var.M_Sxref = var.M_sanglex * cos( var.M_roll ) - var.M_sangley * sin( var.M_roll )
var.M_Syref = var.M_sanglex * sin( var.M_roll ) + var.M_sangley * cos( var.M_roll )
//*********************************************************************************************************************
// MOBILE WII REMOTE w1 - YAW AND PITCH COMPONENTS AFTER ROLL RECTIFICATION AND SENSE CORRECTION
var.M_yawangle = var.M_Sxref // rectified yaw angle component
var.M_pitchangle = 0 - var.M_Syref // rectified pitch angle component
//*********************************************************************************************************************
// ANGLE ROTATION SECTION
// NET REAL YAW, PITCH & ROLL ANGLES as detected by the Mobile Remote looking at the Stationary Remote
// One to One direct motion output
// Angles in DEGREES
// Based on Right Hand Coordinate System
// PHYSICAL VIEW basis - Motion measured relative to the Stationary Wii Remote Axes Orientation
var.yawout = var.M_yawangle + var.S_yaw // yaw positive is left of vertical
var.pitchout = var.M_pitchangle - var.S_pitch // pitch positive is up from horizontal
var.rollout = var.M_roll // roll positive is anticlockwise from horizontal
// debug = 'Mobile Controller Output Angles (yaw, pitch, roll) ( ' + var.yawout + ', ' + var.pitchout + ', ' + var.rollout + ' )'
//*********************************************************************************************************************
// OUTPUTTING ANGLES FOR APPLICATIONS
// CUSTOM Angle Profile settings can be adapted here for particular applications/features
// Examples of features include Smoothing, Deadband, Inversion, Mouseview, Sensitivity Bias and TrackIR emulation
// TrueView has not been implemented
// Note: ROLL may require inversion for applications based on a Left Hand Coordinate system
//Custom Angle settings for Battle of Britain 2
//Game settings, Options - Advanced - Game : check TRACKIR & VECTOR EXPANSION & VE Z AXIS MODE ( Z Axis or FOV mode as required)
var.interimy = 0 - 6 * var.yawout
var.interimp = 6 * var.pitchout
var.interimr = 0 - var.rollout
FakeTrackIR.yaw = Smooth( var.interimy , 5)
FakeTrackIR.pitch = Smooth( var.interimp , 5)
FakeTrackIR.roll = Smooth( var.interimr, 5)
//*********************************************************************************************************************
// TRANSLATIONS SECTION
var.M_Sobliquesemibaselinedist = var.S_ledbaseline/2*cos( var.S_yaw )
var.M_Sbaselinehalfangle = var.wiicamangletopixel * var.M_Sledbaselinepixeldist /2
var.twistaxisdistance = var.M_Sobliquesemibaselinedist/tan( var.M_Sbaselinehalfangle)
var.zdistance = var.twistaxisdistance * cos( var.S_angleYP )
// REAL TRANSLATIONS
// NET REAL X, Y & Z translations as detected by the Mobile Remote looking at the Stationary Remote
// One to One direct motion output
// Translations in CENTIMETRES
// Based on Right Hand Coordinate System
// PHYSICAL VIEW basis - Motion is measured relative from the centre point of the Stationary Wii Remote Camera
var.xtranslation = var.zdistance * tan( var.S_yaw ) // X positive is directed right of vertical
var.ytranslation = var.zdistance * tan( var.S_pitch ) // Y positive is directed up from horizontal
var.ztranslation = var.zdistance // Z positive is directed backwards on the horizontal
//debug = ' Mobile Controller Output Translations (x,y,z) (' + var.xtranslation + ', ' + var.ytranslation + ', ' + var.ztranslation + ' )'
//*********************************************************************************************************************
// OUTPUTTING TRANSLATIONS FOR APPLICATIONS
// CUSTOM Translation Profile settings can be adapted here for particular applications/features
// Examples of features include Smoothing, Deadband, Inversion, Sensitivity Bias, Zooming and TrackIR emulation
// TrueView has not been implemented
// NOTE: TrackIR and FakeTrackIR Translation outputs need to be in METRES (refer GlovePie Help Manual)
// NOTE: Z-axis motion may require inversion for applications based on a Left Hand Coordinate system
//Custom Translation settings for Battle of Britain 2
//Game settings, Options - Advanced - Game : check TRACKIR & VECTOR EXPANSION & VE Z AXIS MODE ( Z Axis or FOV mode as required)
FakeTrackIR.x = Smooth(var.xtranslation/100, 5)
FakeTrackIR.y = Smooth(var.ytranslation/100, 5)
// FOV MODE - zooming for external view
// FakeTrackIR.z = Smooth( (0.6 - var.ztranslation/100 ) * 1.5 , 5)
// Z AXIS MODE - zooming for cockpit instruments - internal view
FakeTrackIR.z = Smooth( (0.6 - var.ztranslation/100 ) * 1.5 , 5)
// end translation section
else // LED coordinate not detected
// debug = 'W1 LED 1 ( ' + var.w1dx1 + ' ,' + var.w1dy1 + ' ) ' + 'W1 LED 2 ( ' + var.w1dx2 + ' ,' + var.w1dy2 + ' ) ' + 'W2 LED 1 ( ' + var.w2dx1 + ' ,' + var.w2dy1 + ' ) ' + 'W2 LED 2 ( ' + var.w2dx2 + ' ,' + var.w2dy2 + ' ) ' + wiimote1.dot1vis + ' ' + wiimote1.dot2vis + ' ' + wiimote2.dot1vis + ' ' + wiimote2.dot2vis
end // stop
//***END OF GLOVEPIE PROGRAM***