Small Update (8/28/12) - Just Code:
http://pastebin.com/Z2vHgcRQ
Rotary Encoder is ONLINE
-----------------------------------
Update (8/13/12) - Limping Freeman:
[youtube]http://www.youtube.com/watch?v=V7-ct2xCtBc[/youtube]
Lost one foot (for the day while the glue dries) because the turning was too sticky, but overall, the concept works more or less how I envisioned it.
After using it in its most basic form, I can safely say that this will be the (if not close to it) definitive consumer VR experience with Head tracking, Gun tracking, and the ability to walk backwards (w/ treadmill).
I can't wait for the Rift and its SDK! It's disconcerting to not be able to use my head to follow objects when my virtual body turns. Heck, it's disconcerting to not use my hands at all (and liberating)!
-------------------------Old Post------------------------------------------------------
Hello! I've been posting intermittently here for a couple of months, and I thought that it would be a good time to make my first contribution. Over the past few days I've started building a basic foot platform that is capable of taking a user's ankle rotations, and translating them to the virtual world via mouse emulation.
The Device:
In short: With modified rotating foot platforms attached to one's feet, one can walk on a treadmill and execute the natural ankle turning motions, without straying from the straight treadmill. These motions are then captured via potentiometer, and applied in mouse movements to the virtual world. This "sidesteps" the omni-directional treadmill problem by nipping the turning problem in the bud: the ankle.
This is the original concept I described here a while ago: http://www.mtbs3d.com/phpBB/viewtopic.p ... 840#p75840
Pros:
- Cheap (<$100)
- Captures intuitive turning movement of legs.
- Preserves natural walking motion.
- No latency, extremely precise
- Compatible with all mouse controlled FPSs
- Plug-N-Play: Works just like a mouse, needs no drivers.
- Open-Source: Everything a layman need to build it is right here, or readily available on the internet.
- No Strafing!
- Needs computer controlled treadmill
- Will take a little getting used to.
- Inexperienced could roll ankles.
I've been waiting to make a thread for this until I had something to show off, so here's what I have done:
An Arduino Leonardo is hooked up via RJ45 patch cords to two detachable foot platforms, each with a pressure sensor and a rotary potentiometer. It is held together with scotch tape and superglue.
- Cue Crappy Youtube Video:
[youtube]http://www.youtube.com/watch?v=ipDjvDLdk1s[/youtube] - Cue Crappy Pictures:
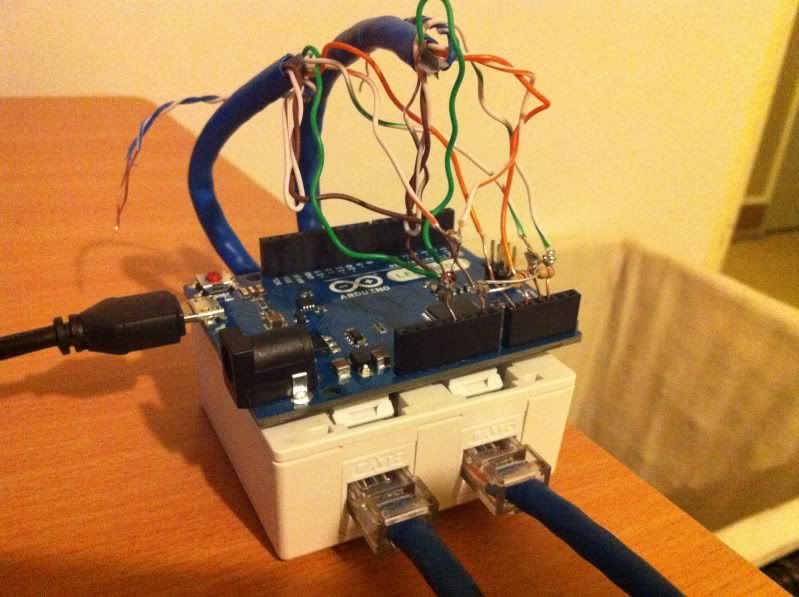
A terrible wiring job by any standard.

The left and right foot platforms. The gray square is the Force Sensitive Resistor, and the bits in the middle are the potentiometers. - Cue Crappy Arduino Program: http://pastebin.com/aXtZCCfj
The next steps are to ruggedize every joint for the wear and tear associated with walking, and to attach a pair of shoes to the plates (More superglue in both cases? (or reusable zip-ties for shoe mounting)). Eventually, I'd like to get the pressure sensors to also detect walking (pressing W), and jumping (pressing space), especially since these require no further hardware modification.
I called it the Simulacrum because it's an actual word, and because I feel that it captures the essence of the device: 1. It's a simulation of walking. 2. It's the fulcrum between the real world and the virtual world.
It's weird that I'm making this, since I own neither an HMD nor a treadmill, but I feel like this idea has some promise and I'd hate to let it die when it has so many intuitive advantages over other solutions like the Cybercarpet, the Cyberwalk (this, by itself, is sub $100 compared to >~$100,000), and the Wizdish. When it's in a good enough state, I'm going to be taking it to my local gym and walking around in Skyrim a bit. I doubt I'll ever develop it anywhere near enough for something like a kickstarter, but I will post the plans and source code online as I build it so anyone with any amount of experience can build their own!
What do you think?