Hi Everyone!
Just another lurker here, been thinking about building my VR setup but the right hardware wasn't available.. Until now of course

I ordered my Oculus the first day. I'd been following the forum for a while.
I was also thinking about making something with free room tracking... Because that would be the best way for immersion. What I was thinking about (I'm a HAM radio operator so I'm thinking along those lines), was 2 radio antennas transmitting a radio signal which is perfectly in sync (one transmitter with 2 cables of the same length to the antennas ought to do that).
The wave interference pattern would create a pattern of hotspots/low spots like so:
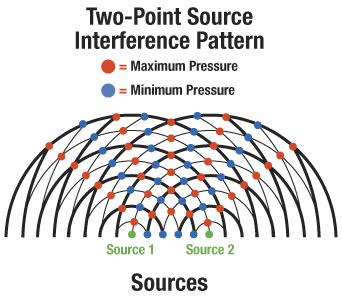
(Image not mine, I just googled it). This is similar to sound waves cancelling each other out depending on the phase. The radius of the circles will depend on the frequency used (for high-resolution you'd want a high frequency with not much spoiling interference so 2.4Ghz is totally out of the question), but maybe 5Ghz is possible as long as it's free of license (not sure if this is the case, haven't looked it up yet). But the user him/herself may block the signal if it's too high in frequency.
If you walk around then with a signal strength meter (tuned to the right frequency), you should get a varying strength als you walk around. With 4 receive antennas in a known square you could perhaps derive some kind of distance information because you could track the signal moving around the room. Unfortunately as you can see the distance between hotspots is not uniform, not predictable, and they don't occur in straight lines, and it's also dependent on the room: If the radio signal starts bouncing off items or walls nearby the pattern may be messed up so much that it becomes static (the wave pattern will be destroyed). But perhaps this is manageable by using as low power as possible.
But I was thinking that if this information is combined with gyro/accelerometer data, it could be used to augment the data.
Not sure if this would actually work but if I have some time I'll see if I can set something up and see if it's in any way useable. It's just something that came to me when I was thinking about this problem, and I just wanted to put this out there in case any of you were thinking along the same lines.